
In the previous experiment the DCF77 clock was extended to
decode everything but the meteo data. Now that that clock can decode “everything” I add another important part. A synchronized local clock. This intended for periods where the DCF77 is not present or where the noise overwhelms the decoder stages.

As you can see from the architecture diagram the local clock is fed both from the clock controller and the timer2 interrupt. That is it gets a tick from the interrupt every millisecond. From the clock controller it should get a tick every second – if everything is fine. Otherwise it must somehow detect this and detach from the controller synchronization if necessary.
In order to achieve a suitable behaviour I implemented it as a finite state machine. See the diagram below for the different states and their transitions.
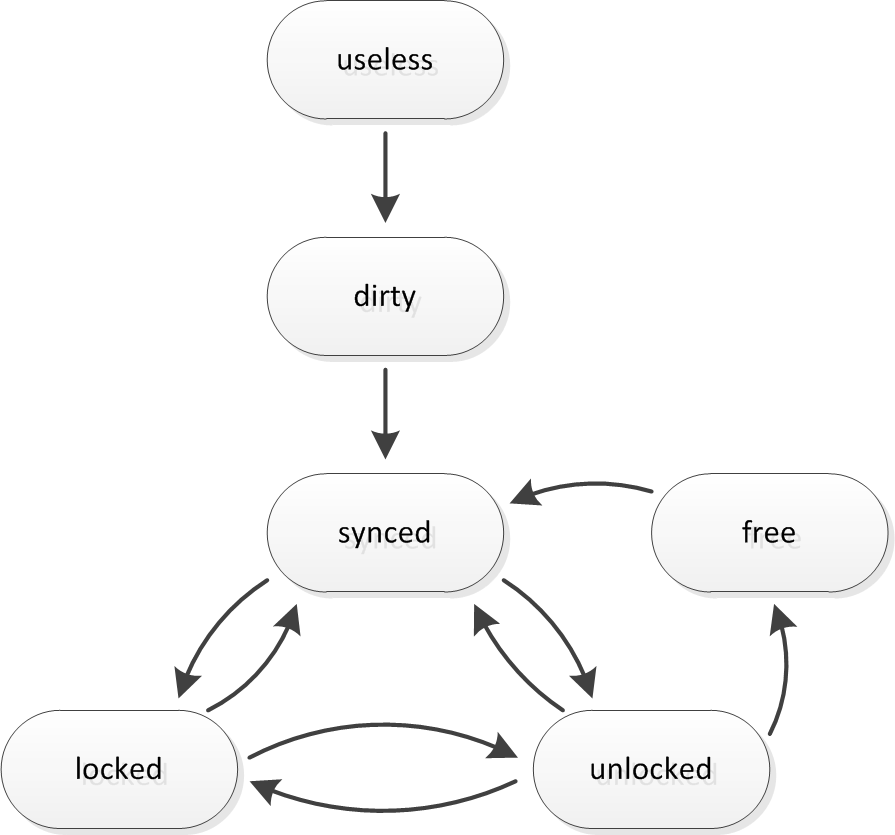
The clock will always start in the state useless. It will stay in this state until the overall quality factor of the decoder stages is at least 1. This quality factor is a measure for the decoded signal quality. If the signal has a little to no glitches it will be very high after a short period of time. Otherwise it will take much longer to become high. Actually the measure is an indicator for the hamming distance of the best decoded candidate to the second best.
In case the quality factor reaches 1 it will transition into the state dirty and start outputing time.
If the quality falls below 1 it will return to the useless state. This is omitted from the diagram (as well as the fact that it can transition directly to the state synced).
If the quality factor raises above 1 then it will transition to synced. Although the arrow is ommited it can directly transition from useless to synced.
Once the clock is in the synced state things become more interesting. As long as the decoder stages quality is 2 or more it will stay in the synced state. This is the best possible quality. Timing is completely locked to DCF77 and the data is most up to date.
If the quality factor of the decoder stages drops but the quality factor of the phase decoder stays high enough the clock will transition into the state locked. In this state it is still phase locked to DCF77 but it may become out of sync by a second. You may wonder why. Well this is due to the leap seconds. If the local clock is only locked and not synced for a long enough period of time it might miss a leap second. In practice this is close to irrelevant but the clock design has to take this into account.
If the phase quality drops as well then the clock will transition into the unlocked state. In this state the seconds will be advanced from the timer2 interupt ticks. Due to the crystal inaccuracies of the Arduino it will start to drift out of phase from DCF77 slowly.
If the clock is in the unlocked state and the DCF77 phase is reacquired with good enough quality it will transition back into the locked state.
You may wonder how the clock can be sure to transition to the proper second tick. The answer is it can not – unless it knows that it could not have drifted to far away.
In order to establish this kind of knowledge there is the free state. Whenever the local clock is running unlocked for more than 3000 seconds it might have drifted by 3000 * 100 ppm = 300 ms. In this case it will transition to the free state. In the free state it is driven by the timer2 interrupt just like in the locked state. However it may not transition back into the locked state directly.
Of course as soon as all decoder stages can offer good enough quality it will always transition to the synced state.
Here comes the source code with the quality factor and local clock extensions.
//
// www.blinkenlight.net
//
// Copyright 2013 Udo Klein
//
// This program is free software: you can redistribute it and/or modify
// it under the terms of the GNU General Public License as published by
// the Free Software Foundation, either version 3 of the License, or
// (at your option) any later version.
//
// This program is distributed in the hope that it will be useful,
// but WITHOUT ANY WARRANTY; without even the implied warranty of
// MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
// GNU General Public License for more details.
//
// You should have received a copy of the GNU General Public License
// along with this program. If not, see http://www.gnu.org/licenses/
namespace BCD {
typedef union {
struct {
uint8_t lo:4;
uint8_t hi:4;
} digit;
struct {
uint8_t b0:1;
uint8_t b1:1;
uint8_t b2:1;
uint8_t b3:1;
uint8_t b4:1;
uint8_t b5:1;
uint8_t b6:1;
uint8_t b7:1;
} bit;
uint8_t val;
} bcd_t;
void increment(bcd_t &value);
bcd_t int_to_bcd(const uint8_t value);
uint8_t bcd_to_int(const uint8_t value);
}
namespace DCF77_Clock {
typedef struct {
BCD::bcd_t year; // 0..99
BCD::bcd_t month; // 1..12
BCD::bcd_t day; // 1..31
BCD::bcd_t weekday; // Mo = 1, So = 7
BCD::bcd_t hour; // 0..23
BCD::bcd_t minute; // 0..59
BCD::bcd_t second; // 0..60
bool uses_summertime;
} time_t;
// Once the clock has locked to the DCF77 signal
// and has decoded a reliable time signal it will
// call output handler once per second
typedef void (*output_handler_t)(const time_t &decoded_time);
// input provider will be called each millisecond and must
// provide the input of the raw DCF77 signal
typedef uint8_t (*input_provider_t)(void);
void setup();
void setup(const input_provider_t input_provider, const output_handler_t output_handler);
void set_input_provider(const input_provider_t);
void set_output_handler(const output_handler_t output_handler);
// blocking till start of next second
void get_current_time(time_t &now);
// non-blocking, reads current second
void read_current_time(time_t &now);
void print(time_t time);
void debug();
// determine quality of the DCF77 signal lock
uint8_t get_overall_quality_factor();
typedef enum {
useless = 0, // waiting for good enough signal
dirty = 1, // time data available but unreliable
free = 2, // clock was once synced but now may deviate more than 200 ms, must not re-lock if valid phase is detected
unlocked = 3, // lock was once synced, inaccuracy below 200 ms, may re-lock if a valid phase is detected
locked = 4, // clock driven by accurate phase, time is accurate but not all decoder stages have sufficient quality for sync
synced = 5 // best possible quality, clock is 100% synced
} clock_state_t;
// determine the internal clock state
uint8_t get_clock_state();
// determine the short term signal quality
// 0xff = not available
// 0..25 = extraordinary poor
// 25.5 would be the expected value for 100% noise
// 26 = very poor
// 50 = best possible, every signal bit matches with the local clock
uint8_t get_prediction_match();
}
namespace DCF77_1_Khz_Generator {
void setup(const DCF77_Clock::input_provider_t input_provider);
uint8_t zero_provider();
}
namespace Debug {
void debug_helper(char data);
void bcddigit(uint8_t data);
void bcddigits(uint8_t data);
}
namespace Hamming {
typedef struct {
uint8_t lock_max;
uint8_t noise_max;
} lock_quality_t;
}
typedef union {
struct {
uint8_t b0:2;
uint8_t b1:2;
uint8_t b2:2;
uint8_t b3:2;
} signal;
uint8_t byte;
} tData;
namespace DCF77 {
typedef enum {
long_tick = 3,
short_tick = 2,
undefined = 1,
sync_mark = 0
} tick_t;
typedef struct {
uint8_t byte_0; // bit 16-20 // flags
uint8_t byte_1; // bit 21-28 // minutes
uint8_t byte_2; // bit 29-36 // hours, bit 0 of day
uint8_t byte_3; // bit 37-44 // day + weekday
uint8_t byte_4; // bit 45-52 // month + bit 0-2 of year
uint8_t byte_5; // bit 52-58 // year + parity
} serialized_clock_stream;
typedef struct {
BCD::bcd_t year; // 0..99
BCD::bcd_t month; // 1..12
BCD::bcd_t day; // 1..31
BCD::bcd_t weekday; // Mo = 1, So = 7
BCD::bcd_t hour; // 0..23
BCD::bcd_t minute; // 0..59
uint8_t second; // 0..60
bool uses_summertime : 1; // false -> wintertime, true, summertime
bool uses_backup_antenna : 1; // typically false
bool timezone_change_scheduled : 1;
bool leap_second_scheduled : 1;
bool undefined_minute_output : 1;
bool undefined_uses_summertime_output : 1;
bool undefined_uses_backup_antenna_output : 1;
bool undefined_timezone_change_scheduled_output : 1;
} time_data_t;
typedef void (*output_handler_t)(const DCF77::time_data_t &decoded_time);
typedef enum {
useless = 0, // waiting for good enough signal
dirty = 1, // time data available but unreliable
free = 2, // clock was once synced but now may deviate more than 200 ms, must not re-lock if valid phase is detected
unlocked = 3, // lock was once synced, inaccuracy below 200 ms, may re-lock if a valid phase is detected
locked = 4, // no valid time data but clock driven by accurate phase
synced = 5 // best possible quality, clock is 100% synced
} clock_state_t;
}
namespace DCF77_Encoder {
// What *** exactly *** is the semantics of the "Encoder"?
// It only *** encodes *** whatever time is set
// It does never attempt to verify the data
void reset(DCF77::time_data_t &now);
void get_serialized_clock_stream(const DCF77::time_data_t &now, DCF77::serialized_clock_stream &data);
uint8_t weekday(const DCF77::time_data_t &now); // sunday == 0
BCD::bcd_t bcd_weekday(const DCF77::time_data_t &now); // sunday == 7
DCF77::tick_t get_current_signal(const DCF77::time_data_t &now);
// This will advance the second. It will consider the control
// bits while doing so. It will NOT try to properly set the
// control bits. If this is desired "autoset" must be called in
// advance.
void advance_second(DCF77::time_data_t &now);
// The same but for the minute
void advance_minute(DCF77::time_data_t &now);
// This will set the weekday by evaluating the date.
void autoset_weekday(DCF77::time_data_t &now);
// This will set the control bits, as a side effect it sets the weekday
// It will generate the control bits exactly like DCF77 would.
// Look at the leap second and summer / wintertime transistions
// to understand the subtle implications.
void autoset_control_bits(DCF77::time_data_t &now);
void debug(const DCF77::time_data_t &clock);
void debug(const DCF77::time_data_t &clock, const uint16_t cycles);
// Bit Bezeichnung Wert Pegel Bedeutung
// 0 M 0 Minutenanfang (
// 1..14 n/a reserviert
// 15 R Reserveantenne aktiv (0 inaktiv, 1 aktiv)
// 16 A1 Ankündigung Zeitzonenwechsel (1 Stunde vor dem Wechsel für 1 Stunde, d.h ab Minute 1)
// 17 Z1 2 Zeitzonenbit Sommerzeit (MEZ = 0, MESZ = 1); also Zeitzone = UTC + 2*Z1 + Z2
// 18 Z2 1 Zeitzonenbit Winterzeit (MEZ = 1, MESZ = 0); also Zeitzone = UTC + 2*Z1 + Z2
// 19 A2 Ankündigung einer Schaltsekunde (1 Stunde vor der Schaltsekunde für 1 Stunde, d.h. ab Minute 1)
// 20 S 1 Startbit für Zeitinformation
// 21 1 Minuten 1er
// 22 2 Minuten 2er
// 23 4 Minuten 4er
// 24 8 Minuten 8er
// 25 10 Minuten 10er
// 26 20 Minuten 20er
// 27 40 Minuten 40er
// 28 P1 Prüfbit 1 (gerade Parität)
// 29 1 Stunden 1er
// 30 2 Stunden 2er
// 31 4 Stunden 4er
// 32 8 Stunden 8er
// 33 10 Stunden 10er
// 34 20 Stunden 20er
// 35 P2 Prüfbit 2 (gerade Parität)
// 36 1 Tag 1er
// 37 2 Tag 2er
// 38 4 Tag 4er
// 39 8 Tag 8er
// 40 10 Tag 10er
// 41 20 Tag 20er
// 42 1 Wochentag 1er (Mo = 1, Di = 2, Mi = 3,
// 43 2 Wochentag 2er (Do = 4, Fr = 5, Sa = 6,
// 44 4 Wochentag 4er (So = 7)
// 45 1 Monat 1er
// 46 2 Monat 2er
// 47 4 Monat 4er
// 48 8 Monat 8er
// 49 10 Monat 10er
// 50 1 Jahr 1er
// 51 2 Jahr 2er
// 52 4 Jahr 4er
// 53 8 Jahr 8er
// 54 10 Jahr 10er
// 55 20 Jahr 20er
// 56 40 Jahr 40er
// 57 80 Jahr 80er
// 58 P3 Prüftbit 3 (gerade Parität)
// 59 sync Sync Marke, kein Impuls (übliches Minutenende)
// 59 0 Schaltsekunde (sehr selten, nur nach Ankündigung)
// 60 sync Sync Marke, kein Impuls (nur nach Schaltsekunde)
// Falls eine Schaltsekunde eingefügt wird, wird bei Bit 59 eine Sekundenmarke gesendet.
// Der Syncimpuls erfolgt dann in Sekunde 60 statt 59. Üblicherweise wird eine 0 als Bit 59 gesendet
// Üblicherweise springt die Uhr beim Wechsel Winterzeit nach Sommerzeit von 1:59:59 auf 3:00:00
// beim Wechsel Sommerzeit nach Winterzeit von 2:59:59 auf 2:00:00
// Die Zeitinformation wird immer 1 Minute im Vorraus übertragen. D.h. nach der Syncmarke hat
// man die aktuelle Zeit
// http://www.dcf77logs.de/SpecialFiles.aspx
// Schaltsekunden werden in Deutschland von der Physikalisch-Technischen Bundesanstalt festgelegt,
// die allerdings dazu nur die international vom International Earth Rotation and Reference Systems
// Service (IERS) festgelegten Schaltsekunden übernimmt. Im Mittel sind Schaltsekunden etwa alle 18
// Monate nötig und werden vorrangig am 31. Dezember oder 30. Juni, nachrangig am 31. März oder
// 30. September nach 23:59:59 UTC (also vor 1:00 MEZ bzw. 2:00 MESZ) eingefügt. Seit der Einführung
// des Systems 1972 wurden ausschließlich die Zeitpunkte im Dezember und Juni benutzt.
}
namespace DCF77_Naive_Bitstream_Decoder {
void set_bit(const uint8_t second, const uint8_t value, DCF77::time_data_t &now);
}
namespace DCF77_Flag_Decoder {
void setup();
void process_tick(const uint8_t current_second, const uint8_t tick_value);
void reset_after_previous_hour();
void reset_before_new_day();
bool get_uses_summertime();
bool get_uses_backup_antenna();
bool get_timezone_change_scheduled();
bool get_leap_second_scheduled();
void debug();
}
namespace DCF77_Decade_Decoder {
void setup();
void process_tick(const uint8_t current_second, const uint8_t tick_value);
void advance_decade();
BCD::bcd_t get_decade();
void get_quality(Hamming::lock_quality_t &lock_quality);
uint8_t get_quality_factor();
void debug();
}
namespace DCF77_Year_Decoder {
void setup();
void process_tick(const uint8_t current_second, const uint8_t tick_value);
void advance_year();
BCD::bcd_t get_year();
void get_quality(Hamming::lock_quality_t &lock_quality);
uint8_t get_quality_factor();
void debug();
}
namespace DCF77_Month_Decoder {
void setup();
void process_tick(const uint8_t current_second, const uint8_t tick_value);
void advance_month();
BCD::bcd_t get_month();
void get_quality(Hamming::lock_quality_t &lock_quality);
uint8_t get_quality_factor();
void debug();
}
namespace DCF77_Day_Decoder {
void setup();
void process_tick(const uint8_t current_second, const uint8_t tick_value);
void advance_day();
BCD::bcd_t get_day();
void get_quality(Hamming::lock_quality_t &lock_quality);
uint8_t get_quality_factor();
void debug();
}
namespace DCF77_Weekday_Decoder {
void setup();
void process_tick(const uint8_t current_second, const uint8_t tick_value);
void advance_weekday();
BCD::bcd_t get_weekday();
void get_quality(Hamming::lock_quality_t &lock_quality);
uint8_t get_quality_factor();
void debug();
}
namespace DCF77_Hour_Decoder {
void setup();
void process_tick(const uint8_t current_second, const uint8_t tick_value);
void advance_hour();
BCD::bcd_t get_hour();
void get_quality(Hamming::lock_quality_t &lock_quality);
uint8_t get_quality_factor();
void debug();
}
namespace DCF77_Minute_Decoder {
void setup();
void process_tick(const uint8_t current_second, const uint8_t tick_value);
void advance_minute();
BCD::bcd_t get_minute();
void get_quality(Hamming::lock_quality_t &lock_quality);
uint8_t get_quality_factor();
void debug();
}
namespace DCF77_Second_Decoder {
void setup();
void set_convolution_time(const DCF77::time_data_t &now);
void process_single_tick_data(const DCF77::tick_t tick_data);
uint8_t get_second();
void get_quality(Hamming::lock_quality_t &lock_quality);
uint8_t get_quality_factor();
uint8_t get_prediction_match();
void debug();
}
namespace DCF77_Local_Clock {
typedef enum {
useless = 0, // waiting for good enough signal
dirty = 1, // time data available but unreliable
free = 2, // clock was once synced but now may deviate more than 200 ms, must not re-lock if valid phase is detected
unlocked = 3, // lock was once synced, inaccuracy below 200 ms, may re-lock if a valid phase is detected
locked = 4, // no valid time data but clock driven by accurate phase
synced = 5 // best possible quality, clock is 100% synced
} clock_state_t;
void setup();
void process_1_Hz_tick(const DCF77::time_data_t &decoded_time);
void process_1_kHz_tick();
void get_quality();
void debug();
clock_state_t get_state();
// blocking till start of next second
void get_current_time(DCF77::time_data_t &now);
// non-blocking, reads current second
void read_current_time(DCF77::time_data_t &now);
}
namespace DCF77_Clock_Controller {
void setup();
void process_1_kHz_tick_data(const uint8_t sampled_data);
void process_single_tick_data(const DCF77::tick_t tick_data);
void flush(const DCF77::time_data_t &decoded_time);
void set_output_handler(const DCF77_Clock::output_handler_t output_handler);
typedef Hamming::lock_quality_t lock_quality_t;
typedef struct {
struct {
uint32_t lock_max;
uint32_t noise_max;
} phase;
DCF77::clock_state_t clock_state;
uint8_t prediction_match;
lock_quality_t second;
lock_quality_t minute;
lock_quality_t hour;
lock_quality_t weekday;
lock_quality_t day;
lock_quality_t month;
lock_quality_t year;
uint8_t uses_summertime_quality;
uint8_t timezone_change_scheduled_quality;
uint8_t leap_second_scheduled_quality;
} clock_quality_t;
void get_quality(clock_quality_t &clock_quality);
typedef struct {
uint8_t phase;
uint8_t second;
uint8_t minute;
uint8_t hour;
uint8_t weekday;
uint8_t day;
uint8_t month;
uint8_t year;
} clock_quality_factor_t;
void get_quality_factor(clock_quality_factor_t &clock_quality_factor);
uint8_t get_overall_quality_factor();
uint8_t get_clock_state();
uint8_t get_prediction_match();
void phase_lost_event_handler();
void sync_lost_event_handler();
// blocking, will unblock at the start of the second
void get_current_time(DCF77::time_data_t &now);
// non-blocking reads current second
void read_current_time(DCF77::time_data_t &now);
void debug();
}
namespace DCF77_Demodulator {
void setup();
void detector(const uint8_t sampled_data);
void get_quality(uint32_t &lock_max, uint32_t &noise_max);
void get_noise_indicator(uint32_t &noise_indicator);
uint8_t get_quality_factor();
void debug();
}
// test unlocked / locked transitions
// test free handling
// once the clock is locked advancing the stages could be done by the local clock
namespace Debug {
void debug_helper(char data) { Serial.print(data == 0? 'S': data == 1? '?': data - 2 + '0', 0); }
void bcddigit(uint8_t data) {
if (data <= 0x09) {
Serial.print(data, HEX);
} else {
Serial.print('?');
}
}
void bcddigits(uint8_t data) {
bcddigit(data >> 4);
bcddigit(data & 0xf);
}
}
namespace BCD {
void print(const bcd_t value) {
Serial.print(value.val >> 4 & 0xF, HEX);
Serial.print(value.val >> 0 & 0xF, HEX);
}
void increment(bcd_t &value) {
if (value.digit.lo < 9) {
++value.digit.lo;
} else {
value.digit.lo = 0;
if (value.digit.hi < 9) {
++value.digit.hi;
} else {
value.digit.hi = 0;
}
}
}
bcd_t int_to_bcd(const uint8_t value) {
const uint8_t hi = value / 10;
bcd_t result;
result.digit.hi = hi;
result.digit.lo = value-10*hi;
return result;
}
uint8_t bcd_to_int(const bcd_t value) {
return value.digit.lo + 10*value.digit.hi;
}
}
namespace Arithmetic_Tools {
template <uint8_t N> inline void bounded_increment(uint8_t &value) __attribute__((always_inline));
template <uint8_t N>
void bounded_increment(uint8_t &value) {
if (value >= 255 - N) { value = 255; } else { value += N; }
}
template <uint8_t N> inline void bounded_decrement(uint8_t &value) __attribute__((always_inline));
template <uint8_t N>
void bounded_decrement(uint8_t &value) {
if (value <= N) { value = 0; } else { value -= N; }
}
inline void bounded_add(uint8_t &value, const uint8_t amount) __attribute__((always_inline));
void bounded_add(uint8_t &value, const uint8_t amount) {
if (value >= 255-amount) { value = 255; } else { value += amount; }
}
inline void bounded_sub(uint8_t &value, const uint8_t amount) __attribute__((always_inline));
void bounded_sub(uint8_t &value, const uint8_t amount) {
if (value <= amount) { value = 0; } else { value -= amount; }
}
inline uint8_t bit_count(const uint8_t value) __attribute__((always_inline));
uint8_t bit_count(const uint8_t value) {
const uint8_t tmp1 = (value & 0b01010101) + ((value>>1) & 0b01010101);
const uint8_t tmp2 = (tmp1 & 0b00110011) + ((tmp1>>2) & 0b00110011);
return (tmp2 & 0x0f) + (tmp2>>4);
}
inline uint8_t parity(const uint8_t value) __attribute__((always_inline));
uint8_t parity(const uint8_t value) {
uint8_t tmp = value;
tmp = (tmp & 0xf) ^ (tmp >> 4);
tmp = (tmp & 0x3) ^ (tmp >> 2);
tmp = (tmp & 0x1) ^ (tmp >> 1);
return tmp;
}
void minimize(uint8_t &minimum, const uint8_t value) {
if (value < minimum) {
minimum = value;
}
}
void maximize(uint8_t &maximum, const uint8_t value) {
if (value > maximum) {
maximum = value;
}
}
uint8_t set_bit(const uint8_t data, const uint8_t number, const uint8_t value) {
return value? data|(1<<number): data&~(1<<number);
}
}
namespace Hamming {
template <uint8_t significant_bits>
void score (uint8_t &bin, const BCD::bcd_t input, const BCD::bcd_t candidate) {
using namespace Arithmetic_Tools;
const uint8_t the_score = significant_bits - bit_count(input.val ^ candidate.val);
bounded_add(bin, the_score);
}
template <typename bins_t>
void advance_tick(bins_t &bins) {
const uint8_t number_of_bins = sizeof(bins.data) / sizeof(bins.data[0]);
if (bins.tick < number_of_bins - 1) {
++bins.tick;
} else {
bins.tick = 0;
}
}
template <typename bins_type, uint8_t significant_bits, bool with_parity>
void hamming_binning(bins_type &bins, const BCD::bcd_t input) {
using namespace Arithmetic_Tools;
using namespace BCD;
const uint8_t number_of_bins = sizeof(bins.data) / sizeof(bins.data[0]);
if (bins.max > 255-significant_bits) {
// If we know we can not raise the maximum any further we
// will lower the noise floor instead.
for (uint8_t bin_index = 0; bin_index <number_of_bins; ++bin_index) {
bounded_decrement<significant_bits>(bins.data[bin_index]);
}
bins.max -= significant_bits;
bounded_decrement<significant_bits>(bins.noise_max);
}
const uint8_t offset = number_of_bins-1-bins.tick;
uint8_t bin_index = offset;
// for minutes, hours have parity and start counting at 0
// for days, weeks, month we have no parity and start counting at 1
// for years and decades we have no parity and start counting at 0
bcd_t candidate;
candidate.val = (with_parity || number_of_bins == 10)? 0x00: 0x01;
for (uint8_t pass=0; pass < number_of_bins; ++pass) {
if (with_parity) {
candidate.bit.b7 = parity(candidate.val);
score<significant_bits>(bins.data[bin_index], input, candidate);
candidate.bit.b7 = 0;
} else {
score<significant_bits>(bins.data[bin_index], input, candidate);
}
bin_index = bin_index < number_of_bins-1? bin_index+1: 0;
increment(candidate);
}
}
template <typename bins_t>
void compute_max_index(bins_t &bins) {
const uint8_t number_of_bins = sizeof(bins.data) / sizeof(bins.data[0]);
bins.noise_max = 0;
bins.max = 0;
bins.max_index = 255;
for (uint8_t index = 0; index < number_of_bins; ++index) {
const uint8_t bin_data = bins.data[index];
if (bin_data >= bins.max) {
bins.noise_max = bins.max;
bins.max = bin_data;
bins.max_index = index;
} else if (bin_data > bins.noise_max) {
bins.noise_max = bin_data;
}
}
}
template <typename bins_t>
void setup(bins_t &bins) {
const uint8_t number_of_bins = sizeof(bins.data) / sizeof(bins.data[0]);
for (uint8_t index = 0; index < number_of_bins; ++index) {
bins.data[index] = 0;
}
bins.tick = 0;
bins.max = 0;
bins.max_index = 255;
bins.noise_max = 0;
}
template <typename bins_t>
BCD::bcd_t get_time_value(const bins_t &bins) {
// there is a trade off involved here:
// low threshold --> lock will be detected earlier
// low threshold --> if lock is not clean output will be garbled
// a proper lock will fix the issue
// the question is: which start up behaviour do we prefer?
const uint8_t threshold = 2;
const uint8_t number_of_bins = sizeof(bins.data) / sizeof(bins.data[0]);
const uint8_t offset = (number_of_bins == 60 || number_of_bins == 24 || number_of_bins == 10)? 0x00: 0x01;
if (bins.max-bins.noise_max >= threshold) {
return BCD::int_to_bcd((bins.max_index + bins.tick + 1) % number_of_bins + offset);
} else {
BCD::bcd_t undefined;
undefined.val = 0xff;
return undefined;
}
}
template <typename bins_t>
void get_quality(const bins_t bins, Hamming::lock_quality_t &lock_quality) {
lock_quality.lock_max = bins.max;
lock_quality.noise_max = bins.noise_max;
}
template <typename bins_t>
uint8_t get_quality_factor(const bins_t bins) {
if (bins.max <= bins.noise_max) {
return 0;
}
const uint16_t delta = bins.max - bins.noise_max;
// we define the quality factor as
// (delta) / ld (max + 3)
// unfortunately this is prohibitive expensive to compute
// --> we need some shortcuts
// --> we will cheat a lot
// lookup for ld(n):
// 4 --> 2, 6 --> 2.5, 8 --> 3, 12 --> 3.5
// above 16 --> only count the position of the leading digit
if (bins.max >= 32-3) {
// delta / ld(bins.max+3) ~ delta / ld(bins.max)
uint16_t max = bins.max;
uint8_t log2 = 0;
while (max > 0) {
max >>= 1;
++log2;
}
log2 -= 1;
// now 15 >= log2 >= 5
// multiply by 256/log2 and divide by 256
const uint16_t multiplier =
log2 > 12? log2 > 13? log2 > 14? 256/15
: 256/14
: 256/13
: log2 > 8 ? log2 > 10? log2 > 11? 256/12
: 256/11
: log2 > 9? 256/10
: 256/ 9
: log2 > 6? log2 > 7? 256/ 8
: 256/ 7
: log2 > 5? 256/ 6
: 256/ 5;
return ((uint16_t)delta * multiplier) >> 8;
} else if (bins.max >= 16-3) {
// delta / 4
return delta >> 2;
} else if (bins.max >= 12-3) {
// delta / 3.5
// we know delta <= max < 16-3 = 13 --> delta <= 12
return delta >= 11? 3:
delta >= 7? 2:
delta >= 4? 1:
0;
} else if (bins.max >= 8-3) {
// delta / 3
// we know delta <= max < 12-3 = 9 --> delta <= 8
return delta >= 6? 2:
delta >= 3? 1:
0;
} else if (bins.max >= 6-3) {
// delta / 2.5
// we know delta <= max < 8-3 = 5 --> delta <= 4
return delta >= 3? 1: 0;
} else { // if (bins.max >= 4-3) {
// delta / 2
return delta >> 1;
}
}
template <typename bins_t>
void debug (const bins_t &bins) {
const uint8_t number_of_bins = sizeof(bins.data) / sizeof(bins.data[0]);
const bool uses_integrals = sizeof(bins.max) == 4;
Serial.print(get_time_value(bins).val, HEX);
Serial.print(F(" Tick: "));
Serial.print(bins.tick);
Serial.print(F(" Quality: "));
Serial.print(bins.max, DEC);
Serial.print('-');
Serial.print(bins.noise_max, DEC);
Serial.print(F(" Max Index: "));
Serial.print(bins.max_index, DEC);
Serial.print(F(" Quality Factor: "));
Serial.print(get_quality_factor(bins), DEC);
Serial.print('>');
for (uint8_t index = 0; index < number_of_bins; ++index) {
if (index == bins.max_index ||
(!uses_integrals && index == (bins.max_index+1) % number_of_bins) ||
(uses_integrals && (index == (bins.max_index+10) % number_of_bins ||
(index == (bins.max_index+20) % number_of_bins)))) {
Serial.print('|');
}
Serial.print(bins.data[index],HEX);
}
Serial.println();
}
}
namespace DCF77_Encoder {
using namespace DCF77;
inline uint8_t days_per_month(const DCF77::time_data_t &now) __attribute__((always_inline));
uint8_t days_per_month(const DCF77::time_data_t &now) {
switch (now.month.val) {
case 0x02:
// valid till 31.12.2399
// notice year mod 4 == year & 0x03
return 28 + ((now.year.val != 0) && ((bcd_to_int(now.year) & 0x03) == 0)? 1: 0);
case 0x01: case 0x03: case 0x05: case 0x07: case 0x08: case 0x10: case 0x12: return 31;
case 0x04: case 0x06: case 0x09: case 0x11: return 30;
default: return 0;
}
}
void reset(DCF77::time_data_t &now) {
now.second = 0;
now.minute.val = 0x00;
now.hour.val = 0x00;
now.day.val = 0x01;
now.month.val = 0x01;
now.year.val = 0x00;
now.weekday.val = 0x01;
now.uses_summertime = false;
now.uses_backup_antenna = false;
now.timezone_change_scheduled = false;
now.leap_second_scheduled = false;
now.undefined_minute_output = false;
now.undefined_uses_summertime_output = false;
now.undefined_uses_backup_antenna_output = false;
now.undefined_timezone_change_scheduled_output = false;
}
uint8_t weekday(const DCF77::time_data_t &now) { // attention: sunday will be ==0 instead of 7
using namespace BCD;
if (now.day.val <= 0x31 && now.month.val <= 0x12 && now.year.val <= 0x99) {
// This will compute the weekday for each year in 2001-2099.
// If you really plan to use my code beyond 2099 take care of this
// on your own. My assumption is that it is even unclear if DCF77
// will still exist then.
// http://de.wikipedia.org/wiki/Gau%C3%9Fsche_Wochentagsformel
const uint8_t d = bcd_to_int(now.day);
const uint16_t m = now.month.val <= 0x02? now.month.val + 10:
bcd_to_int(now.month) - 2;
const uint8_t y = bcd_to_int(now.year) - (now.month.val <= 0x02);
// m must be of type uint16_t otherwise this will compute crap
uint8_t day_mod_7 = d + (26*m - 2)/10 + y + y/4;
// We exploit 8 mod 7 = 1
while (day_mod_7 >= 7) {
day_mod_7 -= 7;
day_mod_7 = (day_mod_7 >> 3) + (day_mod_7 & 7);
}
return day_mod_7; // attention: sunday will be == 0 instead of 7
} else {
return 0xff;
}
}
BCD::bcd_t bcd_weekday(const DCF77::time_data_t &now) {
BCD::bcd_t today;
today.val = weekday(now);
if (today.val == 0) {
today.val = 7;
}
return today;
}
void autoset_weekday(DCF77::time_data_t &now) {
now.weekday = bcd_weekday(now);
}
void autoset_timezone(DCF77::time_data_t &now) {
// timezone change may only happen at the last sunday of march / october
// the last sunday is always somewhere in [25-31]
// Wintertime --> Summertime happens at 01:00 UTC == 02:00 CET == 03:00 CEST,
// Summertime --> Wintertime happens at 01:00 UTC == 02:00 CET == 03:00 CEST
if (now.month.val < 0x03) {
// January or February
now.uses_summertime = false;
} else
if (now.month.val == 0x03) {
// March
if (now.day.val < 0x25) {
// Last Sunday of March must be 0x25-0x31
// Thus still to early for summertime
now.uses_summertime = false;
} else
if (uint8_t wd = weekday(now)) {
// wd != 0 --> not a Sunday
if (now.day.val - wd < 0x25) {
// early March --> wintertime
now.uses_summertime = false;
} else {
// late march summertime
now.uses_summertime = true;
}
} else {
// last sunday of march
// decision depends on the current hour
now.uses_summertime = (now.hour.val > 2);
}
} else
if (now.month.val < 0x10) {
// April - September
now.uses_summertime = true;
} else
if (now.month.val == 0x10) {
// October
if (now.day.val < 0x25) {
// early October
now.uses_summertime = true;
} else
if (uint8_t wd = weekday(now)) {
// wd != 0 --> not a Sunday
if (now.day.val - wd < 0x25) {
// early October --> summertime
now.uses_summertime = true;
} else {
// late October --> wintertime
now.uses_summertime = false;
}
} else { // last sunday of october
if (now.hour.val == 2) {
// can not derive the flag from time data
// this is the only time the flag is derived
// from the flag vector
} else {
// decision depends on the current hour
now.uses_summertime = (now.hour.val < 2);
}
}
} else {
// November and December
now.uses_summertime = false;
}
}
void autoset_timezone_change_scheduled(DCF77::time_data_t &now) {
// summer/wintertime change will always happen
// at clearly defined hours
// http://www.gesetze-im-internet.de/sozv/__2.html
// in doubt have a look here: http://www.dcf77logs.de/
if (now.day.val < 0x25 || weekday(now) != 0) {
// timezone change may only happen at the last sunday of march / october
// the last sunday is always somewhere in [25-31]
// notice that undefined (==0xff) day/weekday data will not cause any action
now.timezone_change_scheduled = false;
} else {
if (now.month.val == 0x03) {
if (now.uses_summertime) {
now.timezone_change_scheduled = (now.hour.val == 0x03 && now.minute.val == 0x00); // wintertime to summertime, preparing first minute of summertime
} else {
now.timezone_change_scheduled = (now.hour.val == 0x01 && now.minute.val != 0x00); // wintertime to summertime
}
} else if (now.month.val == 0x10) {
if (now.uses_summertime) {
now.timezone_change_scheduled = (now.hour.val == 0x02 && now.minute.val != 0x00); // summertime to wintertime
} else {
now.timezone_change_scheduled = (now.hour.val == 0x02 && now.minute.val == 0x00); // summertime to wintertime, preparing first minute of wintertime
}
} else if (now.month.val <= 0x12) {
now.timezone_change_scheduled = false;
}
}
}
void verify_leap_second_scheduled(DCF77::time_data_t &now) {
// If day or month are unknown we default to "no leap second" because this is alway a very good guess.
// If we do not know for sure we are either acquiring a lock right now --> we will easily recover from a wrong guess
// or we have very noisy data --> the leap second bit is probably noisy as well --> we should assume the most likely case
now.leap_second_scheduled &= (now.day.val == 0x01);
// leap seconds will always happen at 00:00 UTC == 01:00 CET == 02:00 CEST
if (now.month.val == 0x01) {
now.leap_second_scheduled &= ((now.hour.val == 0x00 && now.minute.val != 0x00) ||
(now.hour.val == 0x01 && now.minute.val == 0x00));
} else if (now.month.val == 0x07 || now.month.val == 0x04 || now.month.val == 0x10) {
now.leap_second_scheduled &= ((now.hour.val == 0x01 && now.minute.val != 0x00) ||
(now.hour.val == 0x02 && now.minute.val == 0x00));
} else {
now.leap_second_scheduled = false;
}
}
void autoset_control_bits(DCF77::time_data_t &now) {
autoset_weekday(now);
autoset_timezone(now);
autoset_timezone_change_scheduled(now);
// we can not compute leap seconds, we can only verify if they might happen
verify_leap_second_scheduled(now);
}
void advance_second(DCF77::time_data_t &now) {
// in case some value is out of range it will not be advanced
// this is on purpose
if (now.second < 59) {
++now.second;
if (now.second == 15) {
autoset_control_bits(now);
}
} else if (now.leap_second_scheduled && now.second == 59 && now.minute.val == 0x00) {
now.second = 60;
now.leap_second_scheduled = false;
} else if (now.second == 59 || now.second == 60) {
now.second = 0;
advance_minute(now);
}
}
void advance_minute(DCF77::time_data_t &now) {
if (now.minute.val < 0x59) {
increment(now.minute);
} else if (now.minute.val == 0x59) {
now.minute.val = 0x00;
// in doubt have a look here: http://www.dcf77logs.de/
if (now.timezone_change_scheduled && !now.uses_summertime && now.hour.val == 0x01) {
// Wintertime --> Summertime happens at 01:00 UTC == 02:00 CET == 03:00 CEST,
// the clock must be advanced from 01:59 CET to 03:00 CEST
increment(now.hour);
increment(now.hour);
now.uses_summertime = true;
} else if (now.timezone_change_scheduled && now.uses_summertime && now.hour.val == 0x02) {
// Summertime --> Wintertime happens at 01:00 UTC == 02:00 CET == 03:00,
// the clock must be advanced from 02:59 CEST to 02:00 CET
now.uses_summertime = false;
} else {
if (now.hour.val < 0x23) {
increment(now.hour);
} else if (now.hour.val == 0x23) {
now.hour.val = 0x00;
if (now.weekday.val < 0x07) {
increment(now.weekday);
} else if (now.weekday.val == 0x07) {
now.weekday.val = 0x01;
}
if (bcd_to_int(now.day) < days_per_month(now)) {
increment(now.day);
} else if (bcd_to_int(now.day) == days_per_month(now)) {
now.day.val = 0x01;
if (now.month.val < 0x12) {
increment(now.month);
} else if (now.month.val == 0x12) {
now.month.val = 0x01;
if (now.year.val < 0x99) {
increment(now.year);
} else if (now.year.val == 0x99) {
now.year.val = 0x00;
}
}
}
}
}
}
}
DCF77::tick_t get_current_signal(const DCF77::time_data_t &now) {
using namespace Arithmetic_Tools;
if (now.second >= 1 && now.second <= 14) {
// weather data or other stuff we can not compute
return undefined;
}
bool result;
switch (now.second) {
case 0: // start of minute
return short_tick;
case 15:
if (now.undefined_uses_backup_antenna_output) { return undefined; }
result = now.uses_backup_antenna; break;
case 16:
if (now.undefined_timezone_change_scheduled_output) { return undefined; }
result = now.timezone_change_scheduled; break;
case 17:
if (now.undefined_uses_summertime_output) {return undefined; }
result = now.uses_summertime; break;
case 18:
if (now.undefined_uses_summertime_output) {return undefined; }
result = !now.uses_summertime; break;
case 19:
result = now.leap_second_scheduled; break;
case 20: // start of time information
return long_tick;
case 21:
if (now.undefined_minute_output || now.minute.val > 0x59) { return undefined; }
result = now.minute.digit.lo & 0x1; break;
case 22:
if (now.undefined_minute_output || now.minute.val > 0x59) { return undefined; }
result = now.minute.digit.lo & 0x2; break;
case 23:
if (now.undefined_minute_output || now.minute.val > 0x59) { return undefined; }
result = now.minute.digit.lo & 0x4; break;
case 24:
if (now.undefined_minute_output || now.minute.val > 0x59) { return undefined; }
result = now.minute.digit.lo & 0x8; break;
case 25:
if (now.undefined_minute_output || now.minute.val > 0x59) { return undefined; }
result = now.minute.digit.hi & 0x1; break;
case 26:
if (now.undefined_minute_output || now.minute.val > 0x59) { return undefined; }
result = now.minute.digit.hi & 0x2; break;
case 27:
if (now.undefined_minute_output || now.minute.val > 0x59) { return undefined; }
result = now.minute.digit.hi & 0x4; break;
case 28:
if (now.undefined_minute_output || now.minute.val > 0x59) { return undefined; }
result = parity(now.minute.val); break;
case 29:
if (now.hour.val > 0x23) { return undefined; }
result = now.hour.digit.lo & 0x1; break;
case 30:
if (now.hour.val > 0x23) { return undefined; }
result = now.hour.digit.lo & 0x2; break;
case 31:
if (now.hour.val > 0x23) { return undefined; }
result = now.hour.digit.lo & 0x4; break;
case 32:
if (now.hour.val > 0x23) { return undefined; }
result = now.hour.digit.lo & 0x8; break;
case 33:
if (now.hour.val > 0x23) { return undefined; }
result = now.hour.digit.hi & 0x1; break;
case 34:
if (now.hour.val > 0x23) { return undefined; }
result = now.hour.digit.hi & 0x2; break;
case 35:
if (now.hour.val > 0x23) { return undefined; }
result = parity(now.hour.val); break;
case 36:
if (now.day.val > 0x31) { return undefined; }
result = now.day.digit.lo & 0x1; break;
case 37:
if (now.day.val > 0x31) { return undefined; }
result = now.day.digit.lo & 0x2; break;
case 38:
if (now.day.val > 0x31) { return undefined; }
result = now.day.digit.lo & 0x4; break;
case 39:
if (now.day.val > 0x31) { return undefined; }
result = now.day.digit.lo & 0x8; break;
case 40:
if (now.day.val > 0x31) { return undefined; }
result = now.day.digit.hi & 0x1; break;
case 41:
if (now.day.val > 0x31) { return undefined; }
result = now.day.digit.hi & 0x2; break;
case 42:
if (now.weekday.val > 0x7) { return undefined; }
result = now.weekday.val & 0x1; break;
case 43:
if (now.weekday.val > 0x7) { return undefined; }
result = now.weekday.val & 0x2; break;
case 44:
if (now.weekday.val > 0x7) { return undefined; }
result = now.weekday.val & 0x4; break;
case 45:
if (now.month.val > 0x12) { return undefined; }
result = now.month.digit.lo & 0x1; break;
case 46:
if (now.month.val > 0x12) { return undefined; }
result = now.month.digit.lo & 0x2; break;
case 47:
if (now.month.val > 0x12) { return undefined; }
result = now.month.digit.lo & 0x4; break;
case 48:
if (now.month.val > 0x12) { return undefined; }
result = now.month.digit.lo & 0x8; break;
case 49:
if (now.month.val > 0x12) { return undefined; }
result = now.month.digit.hi & 0x1; break;
case 50:
if (now.year.val > 0x99) { return undefined; }
result = now.year.digit.lo & 0x1; break;
case 51:
if (now.year.val > 0x99) { return undefined; }
result = now.year.digit.lo & 0x2; break;
case 52:
if (now.year.val > 0x99) { return undefined; }
result = now.year.digit.lo & 0x4; break;
case 53:
if (now.year.val > 0x99) { return undefined; }
result = now.year.digit.lo & 0x8; break;
case 54:
if (now.year.val > 0x99) { return undefined; }
result = now.year.digit.hi & 0x1; break;
case 55:
if (now.year.val > 0x99) { return undefined; }
result = now.year.digit.hi & 0x2; break;
case 56:
if (now.year.val > 0x99) { return undefined; }
result = now.year.digit.hi & 0x4; break;
case 57:
if (now.year.val > 0x99) { return undefined; }
result = now.year.digit.hi & 0x8; break;
case 58:
if (now.weekday.val > 0x07 ||
now.day.val > 0x31 ||
now.month.val > 0x12 ||
now.year.val > 0x99) { return undefined; }
result = parity(now.day.digit.lo) ^
parity(now.day.digit.hi) ^
parity(now.month.digit.lo) ^
parity(now.month.digit.hi) ^
parity(now.weekday.val) ^
parity(now.year.digit.lo) ^
parity(now.year.digit.hi); break;
case 59:
// special handling for leap seconds
if (now.leap_second_scheduled && now.minute.val == 0) { result = 0; break; }
// standard case: fall through to "sync_mark"
case 60:
return sync_mark;
default:
return undefined;
}
return result? long_tick: short_tick;
}
void get_serialized_clock_stream(const DCF77::time_data_t &now, DCF77::serialized_clock_stream &data) {
using namespace Arithmetic_Tools;
// bit 16-20 // flags
data.byte_0 = 0;
data.byte_0 = set_bit(data.byte_0, 3, now.timezone_change_scheduled );
data.byte_0 = set_bit(data.byte_0, 4, now.uses_summertime);
data.byte_0 = set_bit(data.byte_0, 5, !now.uses_summertime);
data.byte_0 = set_bit(data.byte_0, 6, now.leap_second_scheduled);
data.byte_0 = set_bit(data.byte_0, 7, 1);
// bit 21-28 // minutes
data.byte_1 = set_bit(now.minute.val, 7, parity(now.minute.val));
// bit 29-36 // hours, bit 0 of day
data.byte_2 = set_bit(now.hour.val, 6, parity(now.hour.val));
data.byte_2 = set_bit(data.byte_2, 7, now.day.bit.b0);
// bit 37-44 // day + weekday
data.byte_3 = now.day.val>>1 | now.weekday.val<<5;
// bit 45-52 // month + bit 0-2 of year
data.byte_4 = now.month.val | now.year.val<<5;
const uint8_t date_parity = parity(now.day.digit.lo) ^
parity(now.day.digit.hi) ^
parity(now.month.digit.lo) ^
parity(now.month.digit.hi) ^
parity(now.weekday.val) ^
parity(now.year.digit.lo) ^
parity(now.year.digit.hi);
// bit 53-58 // year + parity
data.byte_5 = set_bit(now.year.val>>3, 5, date_parity);
}
void debug(const DCF77::time_data_t &clock) {
using namespace Debug;
Serial.print(F(" "));
bcddigits(clock.year.val);
Serial.print('.');
bcddigits(clock.month.val);
Serial.print('.');
bcddigits(clock.day.val);
Serial.print('(');
bcddigit(clock.weekday.val);
Serial.print(',');
bcddigit(weekday(clock));
Serial.print(')');
bcddigits(clock.hour.val);
Serial.print(':');
bcddigits(clock.minute.val);
Serial.print(':');
if (clock.second < 10) {
Serial.print('0');
}
Serial.print(clock.second, DEC);
if (clock.uses_summertime) {
Serial.print(F(" MESZ "));
} else {
Serial.print(F(" MEZ "));
}
if (clock.leap_second_scheduled) {
Serial.print(F("leap second scheduled"));
}
if (clock.timezone_change_scheduled) {
Serial.print(F("time zone change scheduled"));
}
}
void debug(const DCF77::time_data_t &clock, const uint16_t cycles) {
DCF77::time_data_t local_clock = clock;
DCF77::time_data_t decoded_clock;
Serial.print(F("M ?????????????? RAZZA S mmmmMMMP hhhhHHP ddddDD www mmmmM yyyyYYYYP S"));
for (uint16_t second = 0; second < cycles; ++second) {
switch (local_clock.second) {
case 0: Serial.println(); break;
case 1: case 15: case 20: case 21: case 29:
case 36: case 42: case 45: case 50: case 59: Serial.print(' ');
}
const DCF77::tick_t tick_data = get_current_signal(local_clock);
Debug::debug_helper(tick_data);
DCF77_Naive_Bitstream_Decoder::set_bit(local_clock.second, tick_data, decoded_clock);
advance_second(local_clock);
if (local_clock.second == 0) {
debug(decoded_clock);
}
}
Serial.println();
Serial.println();
}
}
namespace DCF77_Naive_Bitstream_Decoder {
using namespace DCF77;
void set_bit(const uint8_t second, const uint8_t value, time_data_t &now) {
// The naive value is a way to guess a value for unclean decoded data.
// It is obvious that this is not necessarily a good value but better
// than nothing.
const uint8_t naive_value = (value == long_tick || value == undefined)? 1: 0;
const uint8_t is_value_bad = value != long_tick && value != short_tick;
now.second = second;
switch (second) {
case 15: now.uses_backup_antenna = naive_value; break;
case 16: now.timezone_change_scheduled = naive_value; break;
case 17:
now.uses_summertime = naive_value;
now.undefined_uses_summertime_output = is_value_bad;
break;
case 18:
if (now.uses_summertime == naive_value) {
// if values of bit 17 and 18 match we will enforce a mapping
if (!is_value_bad) {
now.uses_summertime = !naive_value;
}
}
now.undefined_uses_summertime_output = false;
break;
case 19:
// leap seconds are seldom, in doubt we assume none is scheduled
now.leap_second_scheduled = naive_value && !is_value_bad;
break;
case 20:
// start to decode minute data
now.minute.val = 0x00;
now.undefined_minute_output = false;
break;
case 21: now.minute.val += naive_value; break;
case 22: now.minute.val += 0x2*naive_value; break;
case 23: now.minute.val += 0x4*naive_value; break;
case 24: now.minute.val += 0x8*naive_value; break;
case 25: now.minute.val += 0x10*naive_value; break;
case 26: now.minute.val += 0x20*naive_value; break;
case 27: now.minute.val += 0x40*naive_value; break;
case 28: now.hour.val = 0; break;
case 29: now.hour.val += naive_value; break;
case 30: now.hour.val += 0x2*naive_value; break;
case 31: now.hour.val += 0x4*naive_value; break;
case 32: now.hour.val += 0x8*naive_value; break;
case 33: now.hour.val += 0x10*naive_value; break;
case 34: now.hour.val += 0x20*naive_value; break;
case 35:
now.day.val = 0x00;
now.month.val = 0x00;
now.year.val = 0x00;
now.weekday.val = 0x00;
break;
case 36: now.day.val += naive_value; break;
case 37: now.day.val += 0x2*naive_value; break;
case 38: now.day.val += 0x4*naive_value; break;
case 39: now.day.val += 0x8*naive_value; break;
case 40: now.day.val += 0x10*naive_value; break;
case 41: now.day.val += 0x20*naive_value; break;
case 42: now.weekday.val += naive_value; break;
case 43: now.weekday.val += 0x2*naive_value; break;
case 44: now.weekday.val += 0x4*naive_value; break;
case 45: now.month.val += naive_value; break;
case 46: now.month.val += 0x2*naive_value; break;
case 47: now.month.val += 0x4*naive_value; break;
case 48: now.month.val += 0x8*naive_value; break;
case 49: now.month.val += 0x10*naive_value; break;
case 50: now.year.val += naive_value; break;
case 51: now.year.val += 0x2*naive_value; break;
case 52: now.year.val += 0x4*naive_value; break;
case 53: now.year.val += 0x8*naive_value; break;
case 54: now.year.val += 0x10*naive_value; break;
case 55: now.year.val += 0x20*naive_value; break;
case 56: now.year.val += 0x40*naive_value; break;
case 57: now.year.val += 0x80*naive_value; break;
}
}
}
namespace DCF77_Flag_Decoder {
bool uses_backup_antenna;
int8_t timezone_change_scheduled;
int8_t uses_summertime;
int8_t leap_second_scheduled;
int8_t date_parity;
void setup() {
uses_summertime = 0;
uses_backup_antenna = 0;
timezone_change_scheduled = 0;
leap_second_scheduled = 0;
date_parity = 0;
}
void cummulate(int8_t &average, bool count_up) {
if (count_up) {
average += (average < 127);
} else {
average -= (average > -127);
}
}
void process_tick(const uint8_t current_second, const uint8_t tick_value) {
switch (current_second) {
case 15: uses_backup_antenna = tick_value; break;
case 16: cummulate(timezone_change_scheduled, tick_value); break;
case 17: cummulate(uses_summertime, tick_value); break;
case 18: cummulate(uses_summertime, 1-tick_value); break;
case 19: cummulate(leap_second_scheduled, tick_value); break;
case 58: cummulate(date_parity, tick_value); break;
}
}
void reset_after_previous_hour() {
// HH := hh+1
// timezone_change_scheduled will be set from hh:01 to HH:00
// leap_second_scheduled will be set from hh:01 to HH:00
if (timezone_change_scheduled) {
timezone_change_scheduled = 0;
uses_summertime -= uses_summertime;
}
leap_second_scheduled = 0;
}
void reset_before_new_day() {
// date_parity will stay the same 00:00-23:59
date_parity = 0;
}
bool get_uses_summertime() {
return uses_summertime > 0;
}
bool get_uses_backup_antenna() {
return uses_backup_antenna;
}
bool get_timezone_change_scheduled() {
return timezone_change_scheduled > 0;
}
bool get_leap_second_scheduled() {
return leap_second_scheduled > 0;
}
void get_quality(uint8_t &uses_summertime_quality,
uint8_t &timezone_change_scheduled_quality,
uint8_t &leap_second_scheduled_quality) {
uses_summertime_quality = abs(uses_summertime);
timezone_change_scheduled_quality = abs(timezone_change_scheduled);
leap_second_scheduled_quality = abs(leap_second_scheduled);
}
void debug() {
Serial.print(F("Backup Antenna, TZ change, TZ, Leap scheduled, Date parity: "));
Serial.print(uses_backup_antenna, BIN);
Serial.print(',');
Serial.print(timezone_change_scheduled, DEC);
Serial.print(',');
Serial.print(uses_summertime, DEC);
Serial.print(',');
Serial.print(leap_second_scheduled, DEC);
Serial.print(',');
Serial.println(date_parity, DEC);
}
}
namespace DCF77_Decade_Decoder {
const uint8_t decades_per_century = 10;
typedef struct {
uint8_t data[decades_per_century];
uint8_t tick;
uint8_t noise_max;
uint8_t max;
uint8_t max_index;
} decade_bins;
decade_bins bins;
void advance_decade() {
Hamming::advance_tick(bins);
}
void process_tick(const uint8_t current_second, const uint8_t tick_value) {
using namespace Hamming;
static BCD::bcd_t decade_data;
switch (current_second) {
case 54: decade_data.val += tick_value; break;
case 55: decade_data.val += 0x02*tick_value; break;
case 56: decade_data.val += 0x04*tick_value; break;
case 57: decade_data.val += 0x08*tick_value;
hamming_binning<decade_bins, 4, false>(bins, decade_data); break;
case 58: compute_max_index(bins);
// fall through on purpose
default: decade_data.val = 0;
}
}
void get_quality(Hamming::lock_quality_t &lock_quality) {
Hamming::get_quality(bins, lock_quality);
}
uint8_t get_quality_factor() {
return Hamming::get_quality_factor(bins);
}
BCD::bcd_t get_decade() {
return Hamming::get_time_value(bins);
}
void setup() {
Hamming::setup(bins);
}
void debug() {
Serial.print(F("Decade: "));
Hamming::debug(bins);
}
}
namespace DCF77_Year_Decoder {
const uint8_t years_per_century = 10;
typedef struct {
uint8_t data[years_per_century];
uint8_t tick;
uint8_t noise_max;
uint8_t max;
uint8_t max_index;
} year_bins;
year_bins bins;
void advance_year() {
Hamming::advance_tick(bins);
if (Hamming::get_time_value(bins).val == 0) {
DCF77_Decade_Decoder::advance_decade();
}
}
void process_tick(const uint8_t current_second, const uint8_t tick_value) {
using namespace Hamming;
static BCD::bcd_t year_data;
switch (current_second) {
case 50: year_data.val += tick_value; break;
case 51: year_data.val += 0x2*tick_value; break;
case 52: year_data.val += 0x4*tick_value; break;
case 53: year_data.val += 0x8*tick_value;
hamming_binning<year_bins, 4, false>(bins, year_data); break;
case 54: compute_max_index(bins);
// fall through on purpose
default: year_data.val = 0;
}
DCF77_Decade_Decoder::process_tick(current_second, tick_value);
}
void get_quality(Hamming::lock_quality_t &lock_quality) {
Hamming::get_quality(bins, lock_quality);
Hamming::lock_quality_t decade_lock_quality;
DCF77_Decade_Decoder::get_quality(decade_lock_quality);
Arithmetic_Tools::minimize(lock_quality.lock_max, decade_lock_quality.lock_max);
Arithmetic_Tools::maximize(lock_quality.noise_max, decade_lock_quality.noise_max);
}
uint8_t get_quality_factor() {
const uint8_t qf_years = Hamming::get_quality_factor(bins);
const uint8_t qf_decades = DCF77_Decade_Decoder::get_quality_factor();
return min(qf_years, qf_decades);
}
BCD::bcd_t get_year() {
BCD::bcd_t year = Hamming::get_time_value(bins);
BCD::bcd_t decade = DCF77_Decade_Decoder::get_decade();
if (year.val == 0xff || decade.val == 0xff) {
// undefined handling
year.val = 0xff;
} else {
year.val += decade.val << 4;
}
return year;
}
void setup() {
Hamming::setup(bins);
DCF77_Decade_Decoder::setup();
}
void debug() {
Serial.print(F("Year: "));
Hamming::debug(bins);
DCF77_Decade_Decoder::debug();
}
}
namespace DCF77_Month_Decoder {
const uint8_t months_per_year = 12;
typedef struct {
uint8_t data[months_per_year];
uint8_t tick;
uint8_t noise_max;
uint8_t max;
uint8_t max_index;
} month_bins;
month_bins bins;
void advance_month() {
Hamming::advance_tick(bins);
}
void process_tick(const uint8_t current_second, const uint8_t tick_value) {
using namespace Hamming;
static BCD::bcd_t month_data;
switch (current_second) {
case 45: month_data.val += tick_value; break;
case 46: month_data.val += 0x2*tick_value; break;
case 47: month_data.val += 0x4*tick_value; break;
case 48: month_data.val += 0x8*tick_value; break;
case 49: month_data.val += 0x10*tick_value;
hamming_binning<month_bins, 5, false>(bins, month_data); break;
case 50: compute_max_index(bins);
// fall through on purpose
default: month_data.val = 0;
}
}
void get_quality(Hamming::lock_quality_t &lock_quality) {
Hamming::get_quality(bins, lock_quality);
}
uint8_t get_quality_factor() {
return Hamming::get_quality_factor(bins);
}
BCD::bcd_t get_month() {
return Hamming::get_time_value(bins);
}
void setup() {
Hamming::setup(bins);
}
void debug() {
Serial.print(F("Month: "));
Hamming::debug(bins);
}
}
namespace DCF77_Weekday_Decoder {
const uint8_t weekdays_per_week = 7;
typedef struct {
uint8_t data[weekdays_per_week];
uint8_t tick;
uint8_t noise_max;
uint8_t max;
uint8_t max_index;
} weekday_bins;
weekday_bins bins;
void advance_weekday() {
Hamming::advance_tick(bins);
}
void process_tick(const uint8_t current_second, const uint8_t tick_value) {
using namespace Hamming;
static BCD::bcd_t weekday_data;
switch (current_second) {
case 42: weekday_data.val += tick_value; break;
case 43: weekday_data.val += 0x2*tick_value; break;
case 44: weekday_data.val += 0x4*tick_value;
hamming_binning<weekday_bins, 3, false>(bins, weekday_data); break;
case 45: compute_max_index(bins);
// fall through on purpose
default: weekday_data.val = 0;
}
}
void get_quality(Hamming::lock_quality_t &lock_quality) {
Hamming::get_quality(bins, lock_quality);
}
uint8_t get_quality_factor() {
return Hamming::get_quality_factor(bins);
}
BCD::bcd_t get_weekday() {
return Hamming::get_time_value(bins);
}
void setup() {
Hamming::setup(bins);
}
void debug() {
Serial.print(F("Weekday: "));
Hamming::debug(bins);
}
}
namespace DCF77_Day_Decoder {
const uint8_t days_per_month = 31;
typedef struct {
uint8_t data[days_per_month];
uint8_t tick;
uint8_t noise_max;
uint8_t max;
uint8_t max_index;
} day_bins;
day_bins bins;
void advance_day() {
Hamming::advance_tick(bins);
}
void process_tick(const uint8_t current_second, const uint8_t tick_value) {
using namespace Hamming;
static BCD::bcd_t day_data;
switch (current_second) {
case 36: day_data.val += tick_value; break;
case 37: day_data.val += 0x2*tick_value; break;
case 38: day_data.val += 0x4*tick_value; break;
case 39: day_data.val += 0x8*tick_value; break;
case 40: day_data.val += 0x10*tick_value; break;
case 41: day_data.val += 0x20*tick_value;
hamming_binning<day_bins, 6, false>(bins, day_data); break;
case 42: compute_max_index(bins);
// fall through on purpose
default: day_data.val = 0;
}
}
void get_quality(Hamming::lock_quality_t &lock_quality) {
Hamming::get_quality(bins, lock_quality);
}
uint8_t get_quality_factor() {
return Hamming::get_quality_factor(bins);
}
BCD::bcd_t get_day() {
return Hamming::get_time_value(bins);
}
void setup() {
Hamming::setup(bins);
}
void debug() {
Serial.print(F("Day: "));
Hamming::debug(bins);
}
}
namespace DCF77_Hour_Decoder {
const uint8_t hours_per_day = 24;
typedef struct {
uint8_t data[hours_per_day];
uint8_t tick;
uint8_t noise_max;
uint8_t max;
uint8_t max_index;
} hour_bins;
hour_bins bins;
void advance_hour() {
Hamming::advance_tick(bins);
}
void process_tick(const uint8_t current_second, const uint8_t tick_value) {
using namespace Hamming;
static BCD::bcd_t hour_data;
switch (current_second) {
case 29: hour_data.val += tick_value; break;
case 30: hour_data.val += 0x2*tick_value; break;
case 31: hour_data.val += 0x4*tick_value; break;
case 32: hour_data.val += 0x8*tick_value; break;
case 33: hour_data.val += 0x10*tick_value; break;
case 34: hour_data.val += 0x20*tick_value; break;
case 35: hour_data.val += 0x80*tick_value; // Parity !!!
hamming_binning<hour_bins, 7, true>(bins, hour_data); break;
case 36: compute_max_index(bins);
// fall through on purpose
default: hour_data.val = 0;
}
}
void get_quality(Hamming::lock_quality_t &lock_quality) {
Hamming::get_quality(bins, lock_quality);
}
uint8_t get_quality_factor() {
return Hamming::get_quality_factor(bins);
}
BCD::bcd_t get_hour() {
return Hamming::get_time_value(bins);
}
void setup() {
Hamming::setup(bins);
}
void debug() {
Serial.print(F("Hour: "));
Hamming::debug(bins);
}
}
namespace DCF77_Minute_Decoder {
const uint8_t minutes_per_hour = 60;
typedef struct {
uint8_t data[minutes_per_hour];
uint8_t tick;
uint8_t noise_max;
uint8_t max;
uint8_t max_index;
} minute_bins;
minute_bins bins;
void advance_minute() {
Hamming::advance_tick(bins);
}
void process_tick(const uint8_t current_second, const uint8_t tick_value) {
using namespace Hamming;
static BCD::bcd_t minute_data;
switch (current_second) {
case 21: minute_data.val += tick_value; break;
case 22: minute_data.val += 0x2*tick_value; break;
case 23: minute_data.val += 0x4*tick_value; break;
case 24: minute_data.val += 0x8*tick_value; break;
case 25: minute_data.val += 0x10*tick_value; break;
case 26: minute_data.val += 0x20*tick_value; break;
case 27: minute_data.val += 0x40*tick_value; break;
case 28: minute_data.val += 0x80*tick_value; // Parity !!!
hamming_binning<minute_bins, 8, true>(bins, minute_data); break;
case 29: compute_max_index(bins);
// fall through on purpose
default: minute_data.val = 0;
}
}
void setup() {
Hamming::setup(bins);
}
void get_quality(Hamming::lock_quality_t &lock_quality) {
Hamming::get_quality(bins, lock_quality);
}
uint8_t get_quality_factor() {
return Hamming::get_quality_factor(bins);
}
BCD::bcd_t get_minute() {
return Hamming::get_time_value(bins);
}
void debug() {
Serial.print(F("Minute: "));
Hamming::debug(bins);
}
}
namespace DCF77_Second_Decoder {
using namespace DCF77;
const uint8_t seconds_per_minute = 60;
// this is a trick threshold
// lower it to get a faster second lock
// but then risk to garble the successive stages during startup
// --> to low and total startup time will increase
const uint8_t lock_threshold = 12;
typedef struct {
uint8_t data[seconds_per_minute];
uint8_t tick;
uint8_t noise_max;
uint8_t max;
uint8_t max_index;
} sync_bins;
sync_bins bins;
serialized_clock_stream convolution_kernel;
// used to determine how many of the predicted bits are actually observed,
// also used to indicate if convolution is already applied
const uint8_t convolution_binning_not_ready = 0xff;
uint8_t prediction_match = convolution_binning_not_ready;
uint8_t buffered_match = convolution_binning_not_ready;
uint8_t get_prediction_match() {
return buffered_match;
};
void set_convolution_time(const DCF77::time_data_t &now) {
DCF77::time_data_t convolution_clock = now;
// we are always decoding the data for the NEXT minute
DCF77_Encoder::advance_minute(convolution_clock);
// the convolution kernel shall have proper flag settings
DCF77_Encoder::autoset_control_bits(convolution_clock);
DCF77_Encoder::get_serialized_clock_stream(convolution_clock, convolution_kernel);
prediction_match = 0;
}
void convolution_binning(const uint8_t tick_data) {
using namespace Arithmetic_Tools;
// determine sync lock
if (bins.max - bins.noise_max <= lock_threshold || get_second() == 3) {
// after a lock is acquired this happens only once per minute and it is
// reasonable cheap to process,
//
// that is: after we have a "lock" this will be processed whenever
// the sync mark was detected
Hamming::compute_max_index(bins);
const uint8_t convolution_weight = 50;
if (bins.max > 255-convolution_weight) {
// If we know we can not raise the maximum any further we
// will lower the noise floor instead.
for (uint8_t bin_index = 0; bin_index < seconds_per_minute; ++bin_index) {
bounded_decrement<convolution_weight>(bins.data[bin_index]);
}
bins.max -= convolution_weight;
bounded_decrement<convolution_weight>(bins.noise_max);
}
buffered_match = prediction_match;
}
if (tick_data == sync_mark) {
bounded_increment<6>(bins.data[bins.tick]);
if (bins.tick == bins.max_index) {
prediction_match += 6;
}
} else if (tick_data == short_tick || tick_data == long_tick) {
uint8_t decoded_bit = (tick_data == long_tick);
// bit 0 always 0
uint8_t bin = bins.tick>0? bins.tick-1: seconds_per_minute-1;
const bool is_match = (decoded_bit == 0);
bins.data[bin] += is_match;
if (bin == bins.max_index) {
prediction_match += is_match;
}
// bit 16 is where the convolution kernel starts
bin = bin>15? bin-16: bin + seconds_per_minute-16;
uint8_t current_byte_index = 0;
uint8_t current_bit_index = 3;
uint8_t current_byte_value = convolution_kernel.byte_0 >> 3;
while (current_byte_index < 6) {
while (current_bit_index < 8) {
const uint8_t current_bit_value = current_byte_value & 1;
const bool is_match = (decoded_bit == current_bit_value);
bins.data[bin] += is_match;
if (bin == bins.max_index) {
prediction_match += is_match;
}
bin = bin>0? bin-1: seconds_per_minute-1;
current_byte_value >>= 1;
++current_bit_index;
if (current_byte_index == 5 && current_bit_index > 5) {
break;
}
}
current_bit_index = 0;
++current_byte_index;
current_byte_value = (&(convolution_kernel.byte_0))[current_byte_index];
}
}
bins.tick = bins.tick<seconds_per_minute-1? bins.tick+1: 0;
}
void sync_mark_binning(const uint8_t tick_data) {
// We use a binning approach to find out the proper phase.
// The goal is to localize the sync_mark. Due to noise
// there may be wrong marks of course. The idea is to not
// only look at the statistics of the marks but to exploit
// additional data properties:
// Bit position 0 after a proper sync is a 0.
// Bit position 20 after a proper sync is a 1.
// The binning will work as follows:
// 1) A sync mark will score +6 points for the current bin
// it will also score -2 points for the previous bin
// -2 points for the following bin
// and -2 points 20 bins later
// In total this will ensure that a completely lost signal
// will not alter the buffer state (on average)
// 2) A 0 will score +1 point for the previous bin
// it also scores -2 point 20 bins back
// and -2 points for the current bin
// 3) A 1 will score +1 point 20 bins back
// it will also score -2 point for the previous bin
// and -2 points for the current bin
// 4) An undefined value will score -2 point for the current bin
// -2 point for the previous bin
// -2 point 20 bins back
// 5) Scores have an upper limit of 255 and a lower limit of 0.
// Summary: sync mark earns 6 points, a 0 in position 0 and a 1 in position 20 earn 1 bonus point
// anything that allows to infer that any of the "connected" positions is not a sync will remove 2 points
// It follows that the score of a sync mark (during good reception)
// may move up/down the whole scale in slightly below 64 minutes.
// If the receiver should glitch for whatever reason this implies
// that the clock will take about 33 minutes to recover the proper
// phase (during phases of good reception). During bad reception things
// are more tricky.
using namespace Arithmetic_Tools;
const uint8_t previous_tick = bins.tick>0? bins.tick-1: seconds_per_minute-1;
const uint8_t previous_21_tick = bins.tick>20? bins.tick-21: bins.tick + seconds_per_minute-21;
switch (tick_data) {
case sync_mark:
bounded_increment<6>(bins.data[bins.tick]);
bounded_decrement<2>(bins.data[previous_tick]);
bounded_decrement<2>(bins.data[previous_21_tick]);
{ const uint8_t next_tick = bins.tick< seconds_per_minute-1? bins.tick+1: 0;
bounded_decrement<2>(bins.data[next_tick]); }
break;
case short_tick:
bounded_increment<1>(bins.data[previous_tick]);
bounded_decrement<2>(bins.data[bins.tick]);
bounded_decrement<2>(bins.data[previous_21_tick]);
break;
case long_tick:
bounded_increment<1>(bins.data[previous_21_tick]);
bounded_decrement<2>(bins.data[bins.tick]);
bounded_decrement<2>(bins.data[previous_tick]);
break;
case undefined:
default:
bounded_decrement<2>(bins.data[bins.tick]);
bounded_decrement<2>(bins.data[previous_tick]);
bounded_decrement<2>(bins.data[previous_21_tick]);
}
bins.tick = bins.tick<seconds_per_minute-1? bins.tick+1: 0;
// determine sync lock
if (bins.max - bins.noise_max <=lock_threshold ||
get_second() == 3) {
// after a lock is acquired this happens only once per minute and it is
// reasonable cheap to process,
//
// that is: after we have a "lock" this will be processed whenever
// the sync mark was detected
Hamming::compute_max_index(bins);
}
}
void get_quality(Hamming::lock_quality_t &lock_quality) {
Hamming::get_quality(bins, lock_quality);
}
uint8_t get_quality_factor() {
return Hamming::get_quality_factor(bins);
}
uint8_t get_second() {
if (bins.max - bins.noise_max >= lock_threshold) {
// at least one sync mark and a 0 and a 1 seen
// the threshold is tricky:
// higher --> takes longer to acquire an initial lock, but higher probability of an accurate lock
//
// lower --> higher probability that the lock will oscillate at the beginning
// and thus spoil the downstream stages
// we have to subtract 2 seconds
// 1 because the seconds already advanced by 1 tick
// 1 because the sync mark is not second 0 but second 59
uint8_t second = 2*seconds_per_minute + bins.tick - 2 - bins.max_index;
while (second >= seconds_per_minute) { second-= seconds_per_minute; }
return second;
} else {
return 0xff;
}
}
void process_single_tick_data(const DCF77::tick_t tick_data) {
if (prediction_match == convolution_binning_not_ready) {
sync_mark_binning(tick_data);
} else {
convolution_binning(tick_data);
}
}
void setup() {
Hamming::setup(bins);
}
void debug() {
static uint8_t prev_tick;
if (prev_tick == bins.tick) {
return;
} else {
prev_tick = bins.tick;
Serial.print(F("second: "));
Serial.print(get_second(), DEC);
Serial.print(F(" Sync mark index "));
Hamming::debug(bins);
Serial.print(F("Prediction Match: "));
Serial.println(prediction_match, DEC);
Serial.println();
}
}
}
namespace DCF77_Local_Clock {
clock_state_t clock_state = useless;
DCF77::output_handler_t output_handler = 0;
DCF77::time_data_t local_clock_time;
volatile bool second_toggle;
uint16_t tick = 0;
// This will take more than 100 years to overflow.
// An overflow would indicate that the clock is
// running for >100 years without a sync.
// --> It is pointless to handle this.
uint32_t unlocked_seconds = 0;
void setup() {
DCF77_Encoder::reset(local_clock_time);
}
void get_current_time(DCF77::time_data_t &now) {
for (bool stopper = second_toggle; stopper == second_toggle; ) {
// wait for second_toggle to toggle
// that is wait for decoded time to be ready
}
now = local_clock_time;
}
void read_current_time(DCF77::time_data_t &now) {
now = local_clock_time;
}
void process_1_Hz_tick(const DCF77::time_data_t &decoded_time) {
uint8_t quality_factor = DCF77_Clock_Controller::get_overall_quality_factor();
if (quality_factor > 1) {
clock_state = synced;
} else if (clock_state == synced) {
DCF77_Clock_Controller::sync_lost_event_handler();
clock_state = locked;
}
while (true) {
switch (clock_state) {
case useless: {
if (quality_factor > 0) {
clock_state = dirty;
break; // goto dirty state
} else {
second_toggle = !second_toggle;
return;
}
}
case dirty: {
if (quality_factor == 0) {
clock_state = useless;
second_toggle = !second_toggle;
DCF77_Encoder::reset(local_clock_time);
return;
} else {
tick = 0;
local_clock_time = decoded_time;
DCF77_Clock_Controller::flush(decoded_time);
second_toggle = !second_toggle;
return;
}
}
case synced: {
tick = 0;
local_clock_time = decoded_time;
DCF77_Clock_Controller::flush(decoded_time);
second_toggle = !second_toggle;
return;
}
case locked: {
if (DCF77_Demodulator::get_quality_factor() > 1) {
// If we are not sure about leap seconds we will skip
// them. Worst case is that we miss a leap second due
// to noisy reception. This may happen at most once a
// year.
local_clock_time.leap_second_scheduled = false;
// autoset_control_bits is not required because
// advance_second will call this internally anyway
//DCF77_Encoder::autoset_control_bits(local_clock_time);
DCF77_Encoder::advance_second(local_clock_time);
DCF77_Clock_Controller::flush(local_clock_time);
tick = 0;
second_toggle = !second_toggle;
return;
} else {
clock_state = unlocked;
DCF77_Clock_Controller::phase_lost_event_handler();
unlocked_seconds = 0;
return;
}
}
case unlocked: {
if (200 < tick && tick < 800) {
clock_state = free;
return;
} else if (DCF77_Demodulator::get_quality_factor() > 1) {
clock_state = locked;
if (tick < 200) {
// time output was handled at most 200 ms before
tick = 0;
return;
} else {
break; // goto locked state
}
}
}
case free: {
return;
}
}
}
}
void process_1_kHz_tick() {
++tick;
if (clock_state == synced || clock_state == locked) {
// the important part is 150 < 200,
// otherwise it will fall through to free immediately after changing to unlocked
if (tick >= 1150) {
// The 1 Hz pulse was locked but now
// it is definitely out of phase.
unlocked_seconds = 1;
// 1 Hz tick missing for more than 1200ms
clock_state = unlocked;
DCF77_Clock_Controller::phase_lost_event_handler();
}
}
if (clock_state == unlocked || clock_state == free) {
if (tick >= 1000) {
tick -= 1000;
// If we are not sure about leap seconds we will skip
// them. Worst case is that we miss a leap second due
// to noisy reception. This may happen at most once a
// year.
local_clock_time.leap_second_scheduled = false;
// autoset_control_bits is not required because
// advance_second will call this internally anyway
//DCF77_Encoder::autoset_control_bits(local_clock_time);
DCF77_Encoder::advance_second(local_clock_time);
DCF77_Clock_Controller::flush(local_clock_time);
second_toggle = !second_toggle;
++unlocked_seconds;
if (unlocked_seconds > 3000) {
clock_state = free;
}
}
}
}
void set_output_handler(const DCF77::output_handler_t new_output_handler) {
output_handler = new_output_handler;
}
clock_state_t get_state() {
return clock_state;
}
void debug() {
Serial.print(F("Clock state: "));
switch (clock_state) {
case useless: Serial.println(F("useless")); break;
case dirty: Serial.println(F("dirty")); break;
case free: Serial.println(F("free")); break;
case unlocked: Serial.println(F("unlocked")); break;
case locked: Serial.println(F("locked")); break;
case synced: Serial.println(F("synced")); break;
default: Serial.println(F("undefined"));
}
Serial.print(F("Tick: "));
Serial.println(tick);
}
}
namespace DCF77_Clock_Controller {
uint8_t leap_second = 0;
DCF77_Clock::output_handler_t output_handler = 0;
DCF77::time_data_t decoded_time;
void get_current_time(DCF77::time_data_t &now) {
DCF77_Local_Clock::get_current_time(now);
}
void read_current_time(DCF77::time_data_t &now) {
DCF77_Local_Clock::get_current_time(now);
}
void set_DCF77_encoder(DCF77::time_data_t &now) {
using namespace DCF77_Second_Decoder;
using namespace DCF77_Minute_Decoder;
using namespace DCF77_Hour_Decoder;
using namespace DCF77_Weekday_Decoder;
using namespace DCF77_Day_Decoder;
using namespace DCF77_Month_Decoder;
using namespace DCF77_Year_Decoder;
using namespace DCF77_Flag_Decoder;
now.second = get_second();
now.minute = get_minute();
now.hour = get_hour();
now.weekday = get_weekday();
now.day = get_day();
now.month = get_month();
now.year = get_year();
now.uses_backup_antenna = get_uses_backup_antenna();
now.timezone_change_scheduled = get_timezone_change_scheduled();
now.uses_summertime = get_uses_summertime();
now.leap_second_scheduled = get_leap_second_scheduled();
}
void flush() {
// This is called "at the end of each second / before the next second begins."
// The call is triggered by the decoder stages. Thus it flushes the current
// decoded time. If the decoders are out of sync this may not be
// called at all.
DCF77::time_data_t now;
DCF77::time_data_t now_1;
set_DCF77_encoder(now);
now_1 = now;
// leap_second offset to compensate for the skipped second tick
now.second += leap_second > 0;
DCF77_Encoder::advance_second(now);
DCF77_Encoder::autoset_control_bits(now);
decoded_time.second = now.second;
if (now.second == 0) {
// the decoder will always decode the data for the NEXT minute
// thus we have to keep the data of the previous minute
decoded_time = now_1;
decoded_time.second = 0;
if (now.minute.val == 0x01) {
// We are at the last moment of the "old" hour.
// The data for the first minute of the new hour is now complete.
// The point is that we can reset the flags only now.
DCF77_Flag_Decoder::reset_after_previous_hour();
now.uses_summertime = DCF77_Flag_Decoder::get_uses_summertime();
now.timezone_change_scheduled = DCF77_Flag_Decoder::get_timezone_change_scheduled();
now.leap_second_scheduled = DCF77_Flag_Decoder::get_leap_second_scheduled();
DCF77_Encoder::autoset_control_bits(now);
decoded_time.uses_summertime = now.uses_summertime;
decoded_time.timezone_change_scheduled = now.timezone_change_scheduled;
decoded_time.leap_second_scheduled = now.leap_second_scheduled;
decoded_time.uses_backup_antenna = DCF77_Flag_Decoder::get_uses_backup_antenna();
}
if (now.hour.val == 0x23 && now.minute.val == 0x59) {
// We are now starting to process the data for the
// new day. Thus the parity flag is of little use anymore.
// We could be smarter though and merge synthetic parity information with measured historic values.
// that is: advance(now), see if parity changed, if not so --> fine, otherwise change sign of flag
DCF77_Flag_Decoder::reset_before_new_day();
}
// reset leap second
leap_second &= leap_second < 2;
}
// pass control to local clock
DCF77_Local_Clock::process_1_Hz_tick(decoded_time);
}
void flush(const DCF77::time_data_t &decoded_time) {
// This is the callback for the "local clock".
// It will be called once per second.
// It ensures that the local clock is decoupled
// from things like "output handling".
if (output_handler) {
DCF77_Clock::time_t time;
time.second = BCD::int_to_bcd(decoded_time.second);
time.minute = decoded_time.minute;
time.hour = decoded_time.hour;
time.weekday = decoded_time.weekday;
time.day = decoded_time.day;
time.month = decoded_time.month;
time.year = decoded_time.year;
time.uses_summertime = decoded_time.uses_summertime;
output_handler(time);
}
if (decoded_time.second == 15 && DCF77_Local_Clock::clock_state != DCF77_Local_Clock::useless
&& DCF77_Local_Clock::clock_state != DCF77_Local_Clock::dirty
) {
DCF77_Second_Decoder::set_convolution_time(decoded_time);
}
};
void process_1_kHz_tick_data(const uint8_t sampled_data) {
DCF77_Demodulator::detector(sampled_data);
DCF77_Local_Clock::process_1_kHz_tick();
}
void set_output_handler(const DCF77_Clock::output_handler_t new_output_handler) {
output_handler = new_output_handler;
}
void get_quality(clock_quality_t &clock_quality) {
DCF77_Demodulator::get_quality(clock_quality.phase.lock_max, clock_quality.phase.noise_max);
DCF77_Second_Decoder::get_quality(clock_quality.second);
DCF77_Minute_Decoder::get_quality(clock_quality.minute);
DCF77_Hour_Decoder::get_quality(clock_quality.hour);
DCF77_Day_Decoder::get_quality(clock_quality.day);
DCF77_Weekday_Decoder::get_quality(clock_quality.weekday);
DCF77_Month_Decoder::get_quality(clock_quality.month);
DCF77_Year_Decoder::get_quality(clock_quality.year);
DCF77_Flag_Decoder::get_quality(clock_quality.uses_summertime_quality,
clock_quality.timezone_change_scheduled_quality,
clock_quality.leap_second_scheduled_quality);
}
void get_quality_factor(clock_quality_factor_t &clock_quality_factor) {
clock_quality_factor.phase = DCF77_Demodulator::get_quality_factor();
clock_quality_factor.second = DCF77_Second_Decoder::get_quality_factor();
clock_quality_factor.minute = DCF77_Minute_Decoder::get_quality_factor();
clock_quality_factor.hour = DCF77_Hour_Decoder::get_quality_factor();
clock_quality_factor.day = DCF77_Day_Decoder::get_quality_factor();
clock_quality_factor.weekday = DCF77_Weekday_Decoder::get_quality_factor();
clock_quality_factor.month = DCF77_Month_Decoder::get_quality_factor();
clock_quality_factor.year = DCF77_Year_Decoder::get_quality_factor();
}
uint8_t get_overall_quality_factor() {
using namespace Arithmetic_Tools;
uint8_t quality_factor = DCF77_Demodulator::get_quality_factor();
minimize(quality_factor, DCF77_Second_Decoder::get_quality_factor());
minimize(quality_factor, DCF77_Minute_Decoder::get_quality_factor());
minimize(quality_factor, DCF77_Hour_Decoder::get_quality_factor());
uint8_t date_quality_factor = DCF77_Day_Decoder::get_quality_factor();
minimize(date_quality_factor, DCF77_Month_Decoder::get_quality_factor());
minimize(date_quality_factor, DCF77_Year_Decoder::get_quality_factor());
const uint8_t weekday_quality_factor = DCF77_Weekday_Decoder::get_quality_factor();
if (date_quality_factor > 0 && weekday_quality_factor > 0) {
DCF77::time_data_t now;
now.second = DCF77_Second_Decoder::get_second();
now.minute = DCF77_Minute_Decoder::get_minute();
now.hour = DCF77_Hour_Decoder::get_hour();
now.weekday = DCF77_Weekday_Decoder::get_weekday();
now.day = DCF77_Day_Decoder::get_day();
now.month = DCF77_Month_Decoder::get_month();
now.year = DCF77_Year_Decoder::get_year();
BCD::bcd_t weekday = DCF77_Encoder::bcd_weekday(now);
if (weekday.val == 0) {
weekday.val = 7;
}
if (now.weekday.val == weekday.val) {
date_quality_factor += 1;
} else if (date_quality_factor <= weekday_quality_factor) {
date_quality_factor = 0;
}
}
minimize(quality_factor, date_quality_factor);
return quality_factor;
};
uint8_t get_clock_state() {
return DCF77_Local_Clock::get_state();
}
uint8_t get_prediction_match() {
return DCF77_Second_Decoder::get_prediction_match();
}
void debug() {
clock_quality_t clock_quality;
get_quality(clock_quality);
clock_quality_factor_t clock_quality_factor;
get_quality_factor(clock_quality_factor);
Serial.print(F("Quality (p,s,m,h,wd,d,m,y,st,tz,ls,pm): "));
Serial.print(get_overall_quality_factor(), DEC);
Serial.print(F(" ("));
Serial.print(clock_quality.phase.lock_max, DEC);
Serial.print('-');
Serial.print(clock_quality.phase.noise_max, DEC);
Serial.print(':');
Serial.print(clock_quality_factor.phase, DEC);
Serial.print(')');
Serial.print('(');
Serial.print(clock_quality.second.lock_max, DEC);
Serial.print('-');
Serial.print(clock_quality.second.noise_max, DEC);
Serial.print(':');
Serial.print(clock_quality_factor.second, DEC);
Serial.print(')');
Serial.print('(');
Serial.print(clock_quality.minute.lock_max, DEC);
Serial.print('-');
Serial.print(clock_quality.minute.noise_max, DEC);
Serial.print(':');
Serial.print(clock_quality_factor.minute, DEC);
Serial.print(')');
Serial.print('(');
Serial.print(clock_quality.hour.lock_max, DEC);
Serial.print('-');
Serial.print(clock_quality.hour.noise_max, DEC);
Serial.print(':');
Serial.print(clock_quality_factor.hour, DEC);
Serial.print(')');
Serial.print('(');
Serial.print(clock_quality.weekday.lock_max, DEC);
Serial.print('-');
Serial.print(clock_quality.weekday.noise_max, DEC);
Serial.print(':');
Serial.print(clock_quality_factor.weekday, DEC);
Serial.print(')');
Serial.print('(');
Serial.print(clock_quality.day.lock_max, DEC);
Serial.print('-');
Serial.print(clock_quality.day.noise_max, DEC);
Serial.print(':');
Serial.print(clock_quality_factor.day, DEC);
Serial.print(')');
Serial.print('(');
Serial.print(clock_quality.month.lock_max, DEC);
Serial.print('-');
Serial.print(clock_quality.month.noise_max, DEC);
Serial.print(':');
Serial.print(clock_quality_factor.month, DEC);
Serial.print(')');
Serial.print('(');
Serial.print(clock_quality.year.lock_max, DEC);
Serial.print('-');
Serial.print(clock_quality.year.noise_max, DEC);
Serial.print(':');
Serial.print(clock_quality_factor.year, DEC);
Serial.print(')');
Serial.print(clock_quality.uses_summertime_quality, DEC);
Serial.print(',');
Serial.print(clock_quality.timezone_change_scheduled_quality, DEC);
Serial.print(',');
Serial.print(clock_quality.leap_second_scheduled_quality, DEC);
Serial.print(',');
Serial.println(get_prediction_match(), DEC);
}
void phase_lost_event_handler() {
DCF77_Second_Decoder::setup();
DCF77_Minute_Decoder::setup();
DCF77_Hour_Decoder::setup();
DCF77_Day_Decoder::setup();
DCF77_Weekday_Decoder::setup();
DCF77_Month_Decoder::setup();
DCF77_Year_Decoder::setup();
}
void sync_lost_event_handler() {
bool reset_successors = false;
reset_successors = (DCF77_Demodulator::get_quality_factor() == 0);
if (reset_successors) {
DCF77_Second_Decoder::setup();
}
reset_successors |= (DCF77_Second_Decoder::get_quality_factor() == 0);
if (reset_successors) {
DCF77_Minute_Decoder::setup();
}
reset_successors |= (DCF77_Minute_Decoder::get_quality_factor() == 0);
if (reset_successors) {
DCF77_Hour_Decoder::setup();
}
reset_successors |= (DCF77_Hour_Decoder::get_quality_factor() == 0);
if (reset_successors) {
DCF77_Weekday_Decoder::setup();
DCF77_Day_Decoder::setup();
}
reset_successors |= (DCF77_Hour_Decoder::get_quality_factor() == 0);
if (reset_successors) {
DCF77_Month_Decoder::setup();
}
reset_successors |= (DCF77_Month_Decoder::get_quality_factor() == 0);
if (reset_successors) {
DCF77_Year_Decoder::setup();
}
}
void setup() {
DCF77_Demodulator::setup();
phase_lost_event_handler();
}
void process_single_tick_data(const DCF77::tick_t tick_data) {
using namespace DCF77;
using namespace DCF77_Second_Decoder;
using namespace DCF77_Minute_Decoder;
using namespace DCF77_Hour_Decoder;
using namespace DCF77_Weekday_Decoder;
using namespace DCF77_Day_Decoder;
using namespace DCF77_Month_Decoder;
using namespace DCF77_Year_Decoder;
using namespace DCF77_Flag_Decoder;
time_data_t now;
set_DCF77_encoder(now);
now.second += leap_second;
DCF77_Encoder::advance_second(now);
// leap_second == 2 indicates that we are in the 2nd second of the leap second handling
leap_second <<= 1;
// leap_second == 1 indicates that we now process second 59 but not the expected sync mark
leap_second += (now.second == 59 && DCF77_Encoder::get_current_signal(now) != sync_mark);
if (leap_second != 1) {
DCF77_Second_Decoder::process_single_tick_data(tick_data);
if (now.second == 0) {
DCF77_Minute_Decoder::advance_minute();
if (now.minute.val == 0x00) {
// "while" takes automatically care of timezone change
while (get_hour().val <= 0x23 && get_hour().val != now.hour.val) { advance_hour(); }
if (now.hour.val == 0x00) {
if (get_weekday().val <= 0x07) { advance_weekday(); }
// "while" takes automatically care of different month lengths
while (get_day().val <= 0x31 && get_day().val != now.day.val) { advance_day(); }
if (now.day.val == 0x01) {
if (get_month().val <= 0x12) { advance_month(); }
if (now.month.val == 0x01) {
if (now.year.val <= 0x99) { advance_year(); }
}
}
}
}
}
const uint8_t tick_value = (tick_data == long_tick || tick_data == undefined)? 1: 0;
DCF77_Flag_Decoder::process_tick(now.second, tick_value);
DCF77_Minute_Decoder::process_tick(now.second, tick_value);
DCF77_Hour_Decoder::process_tick(now.second, tick_value);
DCF77_Weekday_Decoder::process_tick(now.second, tick_value);
DCF77_Day_Decoder::process_tick(now.second, tick_value);
DCF77_Month_Decoder::process_tick(now.second, tick_value);
DCF77_Year_Decoder::process_tick(now.second, tick_value);
}
}
}
namespace DCF77_Demodulator {
using namespace DCF77;
const uint8_t bin_count = 100;
typedef struct {
uint16_t data[bin_count];
uint8_t tick;
uint32_t noise_max;
uint32_t max;
uint8_t max_index;
} phase_bins;
phase_bins bins;
const uint16_t samples_per_second = 1000;
const uint16_t samples_per_bin = samples_per_second / bin_count;
const uint16_t bins_per_10ms = bin_count / 100;
const uint16_t bins_per_50ms = 5 * bins_per_10ms;
const uint16_t bins_per_60ms = 6 * bins_per_10ms;
const uint16_t bins_per_100ms = 10 * bins_per_10ms;
const uint16_t bins_per_200ms = 20 * bins_per_10ms;
const uint16_t bins_per_500ms = 50 * bins_per_10ms;
void setup() {
Hamming::setup(bins);
}
void decode_220ms(const uint8_t input, const uint8_t bins_to_go) {
// will be called for each bin during the "interesting" 220ms
static uint8_t count = 0;
static uint8_t decoded_data = 0;
count += input;
if (bins_to_go >= bins_per_100ms + bins_per_10ms) {
if (bins_to_go == bins_per_100ms + bins_per_10ms) {
decoded_data = count > bins_per_50ms? 2: 0;
count = 0;
}
} else {
if (bins_to_go == 0) {
decoded_data += count > bins_per_50ms? 1: 0;
count = 0;
// pass control further
// decoded_data: 3 --> 1
// 2 --> 0,
// 1 --> undefined,
// 0 --> sync_mark
DCF77_Clock_Controller::process_single_tick_data((DCF77::tick_t)decoded_data);
}
}
}
uint16_t wrap(const uint16_t value) {
// faster modulo function which avoids division
uint16_t result = value;
while (result >= bin_count) {
result-= bin_count;
}
return result;
}
void phase_detection() {
// We will compute the integrals over 200ms.
// The integrals is used to find the window of maximum signal strength.
uint32_t integral = 0;
for (uint16_t bin = 0; bin < bins_per_100ms; ++bin) {
integral += ((uint32_t)bins.data[bin])<<1;
}
for (uint16_t bin = bins_per_100ms; bin < bins_per_200ms; ++bin) {
integral += (uint32_t)bins.data[bin];
}
bins.max = 0;
bins.max_index = 0;
for (uint16_t bin = 0; bin < bin_count; ++bin) {
if (integral > bins.max) {
bins.max = integral;
bins.max_index = bin;
}
integral -= (uint32_t)bins.data[bin]<<1;
integral += (uint32_t)(bins.data[wrap(bin + bins_per_100ms)] + bins.data[wrap(bin + bins_per_200ms)]);
}
// max_index indicates the position of the 200ms second signal window.
// Now how can we estimate the noise level? This is very tricky because
// averaging has already happened to some extend.
// The issue is that most of the undesired noise happens around the signal,
// especially after high->low transitions. So as an approximation of the
// noise I test with a phase shift of 200ms.
bins.noise_max = 0;
const uint16_t noise_index = wrap(bins.max_index + bins_per_200ms);
for (uint16_t bin = 0; bin < bins_per_100ms; ++bin) {
bins.noise_max += ((uint32_t)bins.data[wrap(noise_index + bin)])<<1;
}
for (uint16_t bin = bins_per_100ms; bin < bins_per_200ms; ++bin) {
bins.noise_max += (uint32_t)bins.data[wrap(noise_index + bin)];
}
}
uint8_t phase_binning(const uint8_t input) {
// how many seconds may be cummulated
// this controls how slow the filter may be to follow a phase drift
// N times the clock precision shall be smaller 1
// clock 30 ppm => N < 300
const uint16_t N = 300;
Hamming::advance_tick(bins);
if (input) {
if (bins.data[bins.tick] < N) {
++bins.data[bins.tick];
}
} else {
if (bins.data[bins.tick] > 0) {
--bins.data[bins.tick];
}
}
return bins.tick;
}
void detector_stage_2(const uint8_t input) {
const uint8_t current_bin = bins.tick;
const uint8_t threshold = 30;
if (bins.max-bins.noise_max < threshold ||
wrap(bin_count + current_bin - bins.max_index) == 53) {
// Phase detection far enough out of phase from anything that
// might consume runtime otherwise.
phase_detection();
}
static uint8_t bins_to_process = 0;
if (bins_to_process == 0) {
if (wrap((bin_count + current_bin - bins.max_index)) <= bins_per_100ms || // current_bin at most 100ms after phase_bin
wrap((bin_count + bins.max_index - current_bin)) <= bins_per_10ms ) { // current bin at most 10ms before phase_bin
// if phase bin varies to much during one period we will always be screwed in may ways...
// last 10ms of current second
DCF77_Clock_Controller::flush();
// start processing of bins
bins_to_process = bins_per_200ms + 2*bins_per_10ms;
}
}
if (bins_to_process > 0) {
--bins_to_process;
// this will be called for each bin in the "interesting" 220ms
// this is also a good place for a "monitoring hook"
decode_220ms(input, bins_to_process);
}
}
void detector(const uint8_t sampled_data) {
static uint8_t current_sample = 0;
static uint8_t average = 0;
// detector stage 0: average 10 samples (per bin)
average += sampled_data;
if (++current_sample >= samples_per_bin) {
// once all samples for the current bin are captured the bin gets updated
// that is each 10ms control is passed to stage 1
const uint8_t input = (average> samples_per_bin/2);
phase_binning(input);
detector_stage_2(input);
average = 0;
current_sample = 0;
}
}
void get_quality(uint32_t &lock_max, uint32_t &noise_max) {
lock_max = bins.max;
noise_max = bins.noise_max;
}
uint8_t get_quality_factor() {
uint32_t delta = bins.max - bins.noise_max;
uint8_t log2_plus_1 = 0;
uint32_t max = bins.max;
while (max) {
max >>= 1;
++log2_plus_1;
}
// crude approximation for delta/log2(max)
while (log2_plus_1) {
log2_plus_1 >>= 1;
delta >>= 1;
}
return delta<256? delta: 255;
};
void debug() {
Serial.print(F("Phase: "));
Hamming::debug(bins);
}
}
namespace DCF77_Clock {
typedef void (*output_handler_t)(const time_t &decoded_time);
typedef uint8_t (*input_provider_t)(void);
void setup() {
DCF77_Clock_Controller::setup();
}
void setup(const input_provider_t input_provider, const output_handler_t output_handler) {
DCF77_Clock_Controller::setup();
DCF77_Clock_Controller::set_output_handler(output_handler);
DCF77_1_Khz_Generator::setup(input_provider);
};
void debug() {
DCF77_Clock_Controller::debug();
}
void set_input_provider(const input_provider_t input_provider) {
DCF77_1_Khz_Generator::setup(input_provider);
}
void set_output_handler(const output_handler_t output_handler) {
DCF77_Clock_Controller::set_output_handler(output_handler);
}
void convert_time(const DCF77::time_data_t ¤t_time, time_t &now) {
now.second = BCD::int_to_bcd(current_time.second);
now.minute = current_time.minute;
now.hour = current_time.hour;
now.weekday = current_time.weekday;
now.day = current_time.day;
now.month = current_time.month;
now.year = current_time.year;
now.uses_summertime = current_time.uses_summertime;
}
void get_current_time(time_t &now) {
DCF77::time_data_t current_time;
DCF77_Clock_Controller::get_current_time(current_time);
convert_time(current_time, now);
};
void read_current_time(time_t &now) {
DCF77::time_data_t current_time;
DCF77_Clock_Controller::read_current_time(current_time);
convert_time(current_time, now);
};
void print(time_t time) {
BCD::print(time.year);
Serial.print('-');
BCD::print(time.month);
Serial.print('-');
BCD::print(time.day);
Serial.print(' ');
Serial.print(time.weekday.val & 0xF, HEX);
Serial.print(' ');
BCD::print(time.hour);
Serial.print(':');
BCD::print(time.minute);
Serial.print(':');
BCD::print(time.second);
if (time.uses_summertime) {
Serial.print(F(" MESZ "));
} else {
Serial.print(F(" MEZ "));
}
}
uint8_t get_overall_quality_factor() {
return DCF77_Clock_Controller::get_overall_quality_factor();
};
uint8_t get_clock_state() {
return DCF77_Clock_Controller::get_clock_state();
};
uint8_t get_prediction_match() {
return DCF77_Clock_Controller::get_prediction_match();
};
}
namespace DCF77_1_Khz_Generator {
uint8_t zero_provider() {
return 0;
}
static DCF77_Clock::input_provider_t the_input_provider = zero_provider;
void init_timer_2() {
// Timer 2 CTC mode, prescaler 64
TCCR2B = (0<<WGM22) | (1<<CS22);
TCCR2A = (1<<WGM21) | (0<<WGM20);
// 249 + 1 == 250 == 250 000 / 1000 = (16 000 000 / 64) / 1000
OCR2A = 249;
// enable Timer 2 interrupts
TIMSK2 = (1<<OCIE2A);
}
void stop_timer_0() {
// ensure that the standard timer interrupts will not
// mess with msTimer2
TIMSK0 = 0;
}
void setup(const DCF77_Clock::input_provider_t input_provider) {
init_timer_2();
stop_timer_0();
the_input_provider = input_provider;
}
}
ISR(TIMER2_COMPA_vect) {
DCF77_Clock_Controller::process_1_kHz_tick_data(DCF77_1_Khz_Generator::the_input_provider());
}
const uint8_t dcf77_sample_pin = 19; // A5
const uint8_t dcf77_analog_sample_pin = 5;
const uint8_t dcf77_monitor_pin = 18; // A4
const uint8_t lower_output_pin = 2;
const uint8_t upper_output_pin = 17;
const uint8_t dcf77_rolling_monitor_lower_pin = 4;
const uint8_t dcf77_rolling_monitor_upper_pin = 13;
uint8_t counter = 0;
uint8_t rolling_pin = dcf77_rolling_monitor_lower_pin;
void reset_output_pins() {
for (uint8_t pin = lower_output_pin; pin <= upper_output_pin; ++pin) {
digitalWrite(pin, LOW);
}
}
void setup_output_pins() {
for (uint8_t pin = lower_output_pin; pin <= upper_output_pin; ++pin) {
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
}
}
uint8_t sample_input_pin() {
// The Blinkenlight LEDs will cut off the input signal
// below a logical high. This is due to the weak
// output signal of the DCF module.
// Hence for the Blinkenlighty
// and the Blinkenlight shield we can not use
// digitalRead.
// Comment the line below if you are not using this code with a
// Blinkenlighty or Blinkenlight shield.
uint8_t sampled_data = analogRead(dcf77_analog_sample_pin)>200;
//uint8_t sampled_data = (((analogRead(dcf77_analog_sample_pin)>200) & (analogRead(dcf77_analog_control_pin)>200)) ==
// (analogRead(dcf77_analog_injection_pin)>200));
// Uncomment the line below if you are using this code with a standard Arduino
//const uint8_t sampled_data = digitalRead(dcf77_sample_pin);
digitalWrite(dcf77_monitor_pin, sampled_data);
return sampled_data;
}
namespace MaxTicks {
void output_handler(const DCF77_Clock::time_t &decoded_time) {
rolling_pin = lower_output_pin;
counter = 0;
}
uint8_t sample_input_pin() {
static uint8_t ticks_per_cycle = 12;
// reuse the sample code from the global namespace
uint8_t sampled_data = ::sample_input_pin();
// additional code for the tick visualization
digitalWrite(rolling_pin, sampled_data);
if (counter < ticks_per_cycle) {
++counter;
} else {
rolling_pin = rolling_pin < upper_output_pin? rolling_pin + 1: lower_output_pin;
counter = 1;
// toggle between 12 and 13 to get 12.5 on average
ticks_per_cycle = 25-ticks_per_cycle;
}
return sampled_data;
}
void setup() {
reset_output_pins();
DCF77_Clock::set_input_provider(sample_input_pin);
DCF77_Clock::set_output_handler(output_handler);
}
}
namespace Ticks {
void output_handler(const DCF77_Clock::time_t &decoded_time) {
rolling_pin = dcf77_rolling_monitor_lower_pin;
counter = 0;
}
uint8_t sample_input_pin() {
// reuse the sample code from the global namespace
uint8_t sampled_data = ::sample_input_pin();
// additional code for the tick visualization
digitalWrite(rolling_pin, sampled_data);
if (counter < 20) {
++counter;
} else {
rolling_pin = rolling_pin < dcf77_rolling_monitor_upper_pin? rolling_pin + 1: dcf77_rolling_monitor_lower_pin;
counter = 1;
}
return sampled_data;
}
void setup() {
reset_output_pins();
DCF77_Clock::set_input_provider(sample_input_pin);
DCF77_Clock::set_output_handler(output_handler);
}
}
namespace Seconds {
void output_handler(const DCF77_Clock::time_t &decoded_time) {
uint8_t out = decoded_time.second.val;
uint8_t pin = lower_output_pin + 3;
for (uint8_t bit=0; bit<8; ++bit) {
digitalWrite(pin++, out & 0x1);
out >>= 1;
if (bit==3) {
++pin;
}
}
}
void setup() {
reset_output_pins();
DCF77_Clock::set_input_provider(sample_input_pin);
DCF77_Clock::set_output_handler(output_handler);
}
}
namespace Hours_and_Minutes {
void output_handler(const DCF77_Clock::time_t &decoded_time) {
uint8_t pin = lower_output_pin;
uint8_t out = decoded_time.minute.val;
for (uint8_t bit=0; bit<7; ++bit) {
digitalWrite(pin++, out & 0x1);
out >>= 1;
}
++pin;
out = decoded_time.hour.val;
for (uint8_t bit=0; bit<6; ++bit) {
digitalWrite(pin++, out & 0x1);
out >>= 1;
}
}
void setup() {
reset_output_pins();
DCF77_Clock::set_input_provider(sample_input_pin);
DCF77_Clock::set_output_handler(output_handler);
}
}
namespace Months_and_Days {
void output_handler(const DCF77_Clock::time_t &decoded_time) {
uint8_t pin = lower_output_pin;
uint8_t out = decoded_time.day.val;
for (uint8_t bit=0; bit<6; ++bit) {
digitalWrite(pin++, out & 0x1);
out >>= 1;
}
++pin;
out = decoded_time.month.val;
for (uint8_t bit=0; bit<5; ++bit) {
digitalWrite(pin++, out & 0x1);
out >>= 1;
}
}
void setup() {
reset_output_pins();
DCF77_Clock::set_input_provider(sample_input_pin);
DCF77_Clock::set_output_handler(output_handler);
}
}
void setup() {
using namespace DCF77_Encoder;
Serial.begin(115200);
Serial.println();
pinMode(dcf77_monitor_pin, OUTPUT);
pinMode(dcf77_sample_pin, INPUT);
digitalWrite(dcf77_sample_pin, HIGH);
setup_output_pins();
DCF77_Clock::setup();
MaxTicks::setup();
}
void loop() {
if (Serial.available()) {
switch (Serial.read()) {
case 't': Ticks::setup(); break;
case 'T': MaxTicks::setup(); break;
case 's': Seconds::setup(); break;
case 'h': Hours_and_Minutes::setup(); break;
case 'm': Months_and_Days::setup(); break;
default: MaxTicks::setup();
}
}
DCF77_Clock::time_t now;
DCF77_Clock::get_current_time(now);
if (now.month.val > 0) {
Serial.println();
Serial.print(F("Decoded time: "));
DCF77_Clock::print(now);
Serial.println();
}
DCF77_Clock::debug();
//DCF77_Second_Decoder::debug();
//DCF77_Local_Clock::debug();
}


That source code is a bit hard to “download”…. and the configuration options for input input pin are very hard to find (they’re hidden in the middle of it).
What makes it hard to download for you? With regard to the configurations: this will be fixed in one of the later versions.
Hi.
Great example.
I fact, there are tools for WordPress to copy a code block to the clipboard with one click. Would be elegant but this is never a reason to complain in my opinion. :).
One question: What do you use for the diagrams?
Hmmm, this functionality was present some months ago. Even for pages where it once worked it seems gone. Seems WordPress implemented some incompatible check. I will investigate this. The diagrams were created with Visio and “FMC TAM” stencils from here http://www.fmc-modeling.org/tam_stencils.